Si deseas distinguir tus productos, servicios o ambos de los de otra empresa, es posible que necesites una marca o nombre comercial. Descubre qué son, en qué consiste su procedimiento de registro y qué implica.

Información sobre los plazos de presentación de solicitudes de transformación de marcas de la Unión Europea en marca nacional española. Más información


Si tienes un nuevo dispositivo, producto o procedimiento que resuelva un problema técnico o tenga una ventaja práctica, existen distintas formas de protegerlo en España y en otros países. Descubre cómo hacerlo.

¿Tu innovación reside en la estética, la ornamentación o la apariencia de tu producto? Protégela mediante un diseño industrial. Descubre qué derechos confiere el registro y cómo realizar la tramitación.

Las indicaciones geográficas protegen el nombre de un producto originario de una zona geográfica, a la cual le debe una determinada calidad, reputación u otra característica. Descubre qué son, en qué consiste su procedimiento de registro y qué beneficios conceden.

Las patentes publicadas en todo el mundo son una valiosa fuente de información científica, técnica y comercial.

Si eres emprendedor/a o una empresa y quieres potenciar y mejorar la rentabilidad de tu negocio protegiendo de forma adecuada los activos intangibles de tu organización, en este espacio encontrarás lo necesario.



 26
resultados
26
resultados
 Última actualización
03/04/2026 [07:45:00]
Última actualización
03/04/2026 [07:45:00]


 Resultados 25 a 26 de 26
Resultados 25 a 26 de 26
Nº publicación: WO2026046493A1 05/03/2026
Solicitante:
HUAWEI TECH CO LTD [CN]
CHOUAYAKH AYMAN [DE]
HUAWEI TECHNOLOGIES CO., LTD,
CHOUAYAKH, Ayman
Resumen de: WO2026046493A1
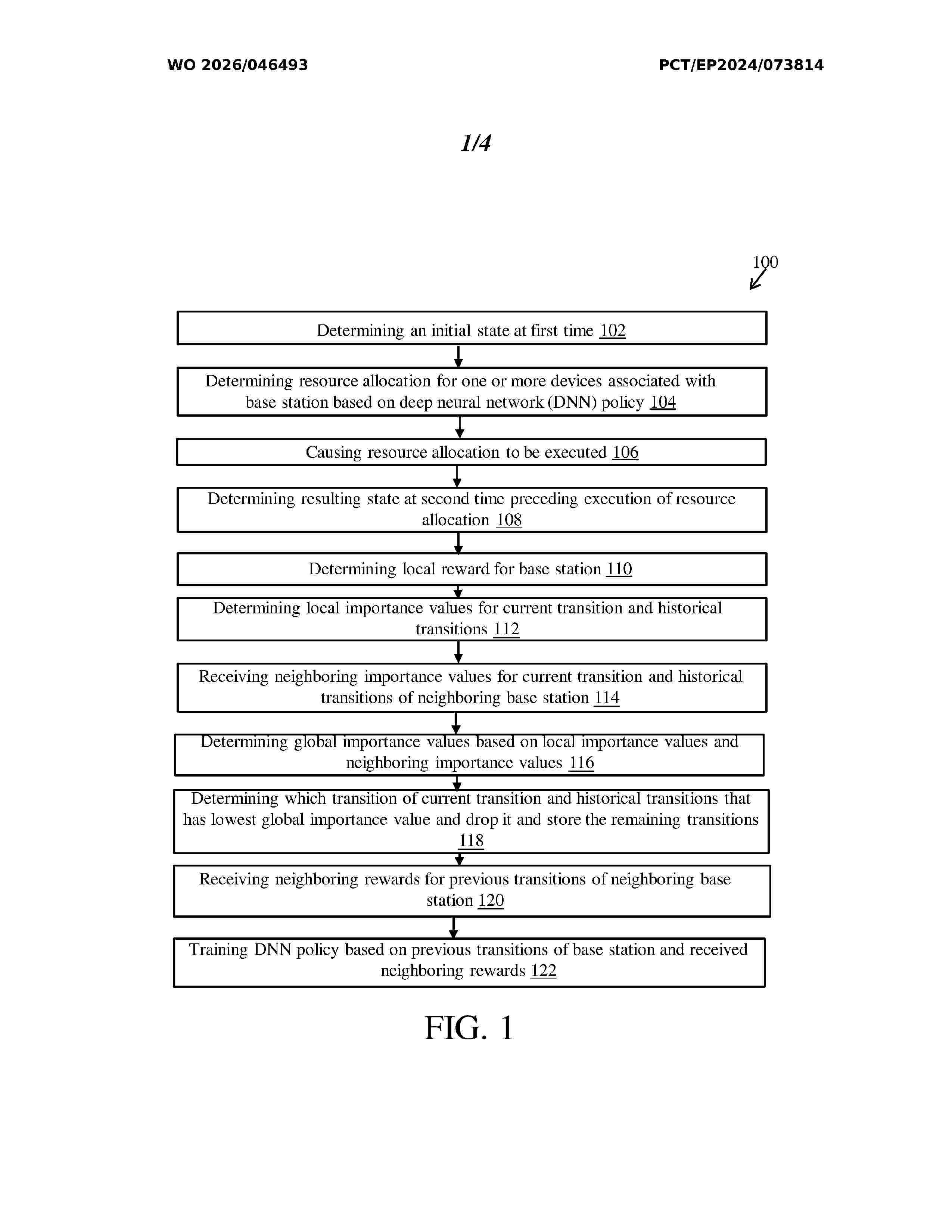
A method for a base station associated with one or more terminal devices comprising determining an initial state at a first time, a resource allocation for the one or more terminal devices associated with the base station based on a Deep Neural Network (DNN) policy, causing the resource allocation to be executed, determining a resulting state at a second time preceding the execution of the resource allocation, a local reward for the base station, and local importance values for a current transition and historical transitions. Further, receiving neighbouring importance values for a current transition and historical transitions of a neighbouring base station, determining global importance values based on the local importance values and neighbouring importance values. Determining which transition of a current transition and historical transitions has the lowest global importance value and drop it to store the remaining transitions. Receiving neighbouring rewards for previous transitions and training the DNN policy based on previous transitions and the received neighbouring rewards.

 BOPI
BOPI
 Sede Electrónica
Sede Electrónica