Si deseas distinguir tus productos, servicios o ambos de los de otra empresa, es posible que necesites una marca o nombre comercial. Descubre qué son, en qué consiste su procedimiento de registro y qué implica.

Información sobre los plazos de presentación de solicitudes de transformación de marcas de la Unión Europea en marca nacional española. Más información


Si tienes un nuevo dispositivo, producto o procedimiento que resuelva un problema técnico o tenga una ventaja práctica, existen distintas formas de protegerlo en España y en otros países. Descubre cómo hacerlo.

¿Tu innovación reside en la estética, la ornamentación o la apariencia de tu producto? Protégela mediante un diseño industrial. Descubre qué derechos confiere el registro y cómo realizar la tramitación.

Las indicaciones geográficas protegen el nombre de un producto originario de una zona geográfica, a la cual le debe una determinada calidad, reputación u otra característica. Descubre qué son, en qué consiste su procedimiento de registro y qué beneficios conceden.

Las patentes publicadas en todo el mundo son una valiosa fuente de información científica, técnica y comercial.

Si eres emprendedor/a o una empresa y quieres potenciar y mejorar la rentabilidad de tu negocio protegiendo de forma adecuada los activos intangibles de tu organización, en este espacio encontrarás lo necesario.



 47
resultados
47
resultados
 Última actualización
30/06/2026 [07:30:00]
Última actualización
30/06/2026 [07:30:00]


 Resultados 25 a 47 de 47
Resultados 25 a 47 de 47
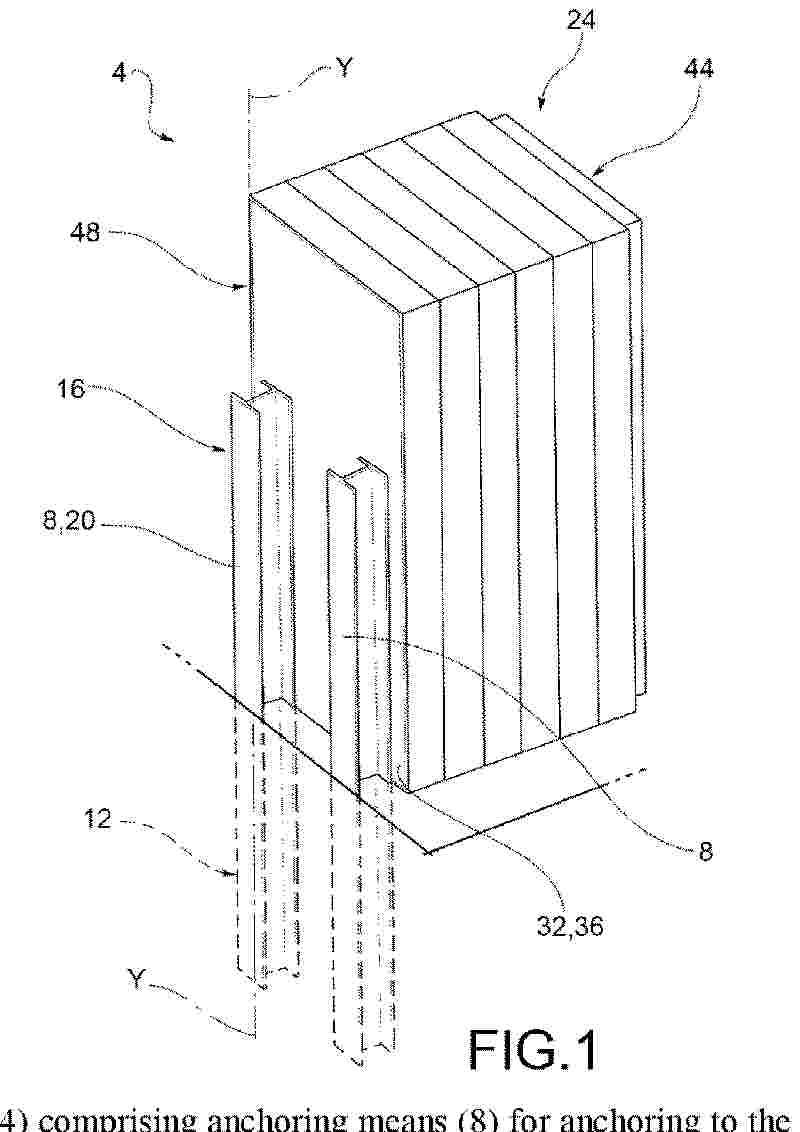
Resumen de: WO2025032435A1
A crash cushion (4) comprising anchoring means (8) for anchoring to the ground, configured so as to allow the crash cushion (4) to be fixed to the ground, said anchoring means (8) extending along a main vertical direction (Y-Y), a dissipating body (24), adapted to dissipate impacts against objects, and connection means (52) for connecting the dissipating body (24) to the anchoring means (8) for anchoring to the ground. The anchoring means (8) comprise a lower portion (12), adapted to be embedded below the ground, and an upper portion (16), arranged cantilevered with respect to the lower portion (12). Said connection means (52) of the dissipating body (24) are associated with the upper portion (16) of the anchoring means (8), so that the dissipating body (24), in the event of an impact, is selectively movable, parallel to said main vertical direction (Y-Y), in a direction away from the ground.

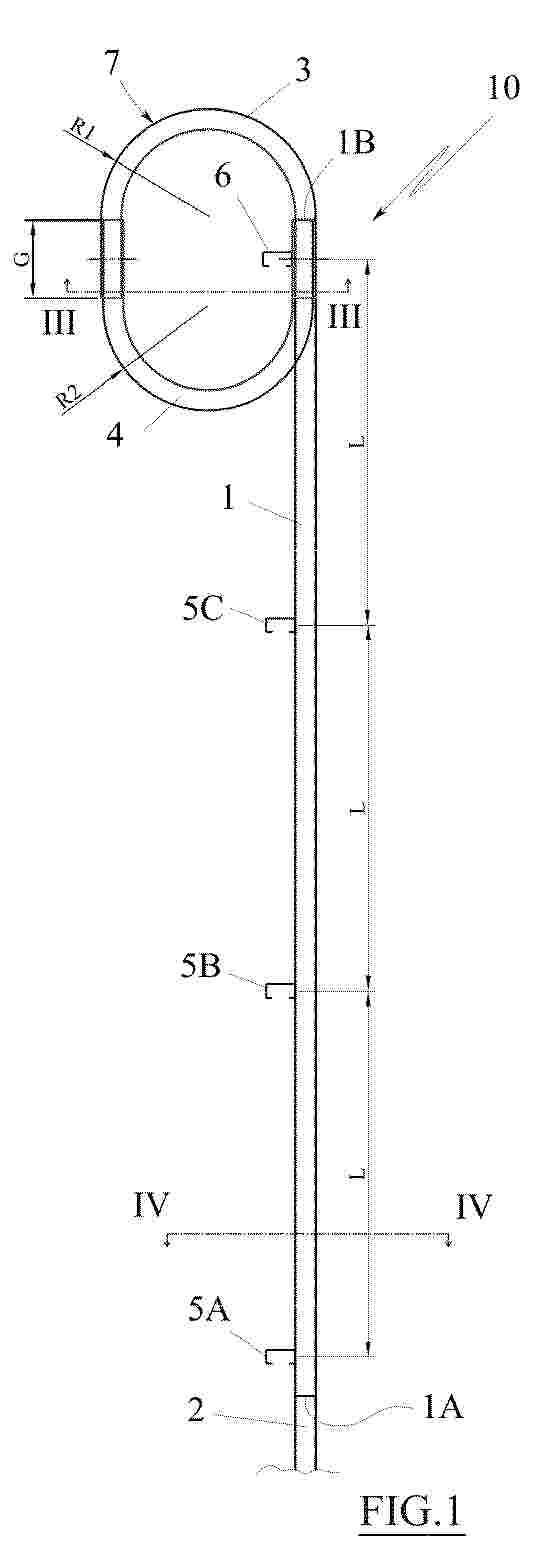
Resumen de: EP4756126A1
0001 A terminal (10) of a road barrier (2) comprising a first straight band (1) with a cross-section with multiple waves, equipped with a first end (1A) connected to a static element (5A) of the said road barrier (2), at least one intermediate post (5B, 5C) connected to the first straight band (1) to support the said band, an end pole (6) connected to a second end of the straight band (1), and a ring (7) with a cross-section wit multiple waves which is supported in a cantilevered fashion by the said end pole (6), the end pole (6) being positioned inside the ring (7).
Resumen de: EP4369324A1
Disclosed herein are systems and methods for identifying and ranking traffic bottlenecks. An example of such methods may include operating at least one processor to: receive traffic data associated with a road network comprising a plurality of road segments, the traffic data comprising vehicle speed data collected from a plurality of vehicles operating within the road network; determine a benchmark speed for each of the plurality of road segments; determine, for each of the plurality of road segments, whether a traffic disruption is present by comparing the benchmark speed thereof to vehicle speed data collected from at least one vehicle operating therealong; determine, for each of the plurality of road segments having the traffic disruption therealong, one or more road segment metrics associated therewith; identify a traffic bottleneck by aggregating a plurality of adjacent road segments having traffic disruptions therealong and the one or more road segment metrics associated therewith; and rank each traffic bottleneck based on one or more aggregated road segment metrics associated therewith.
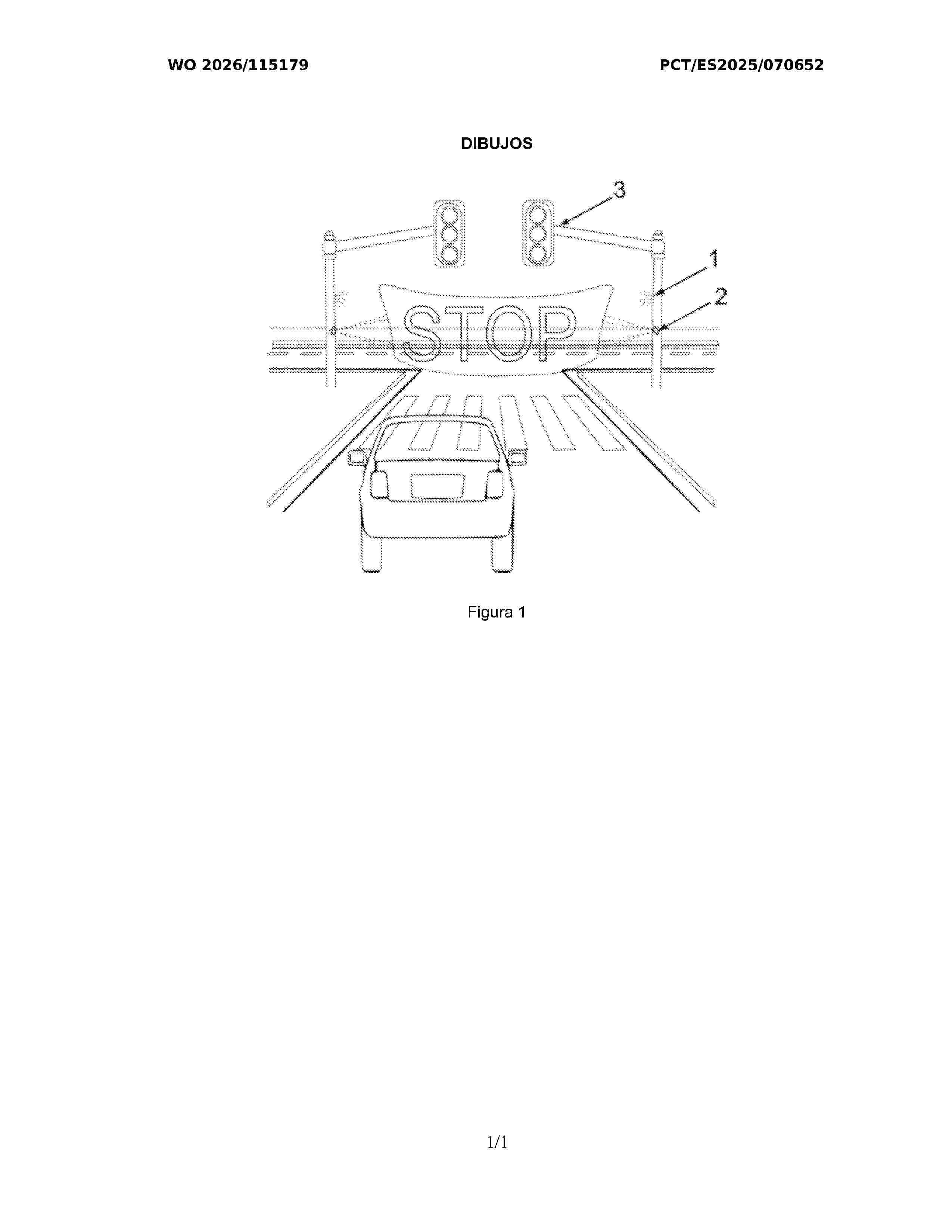
Resumen de: WO2026115179A1
The invention relates to a high-visibility signage system for road safety, comprising luminous elements (1) and/or holographic projectors (2), which, in turn, include a wireless communication system.
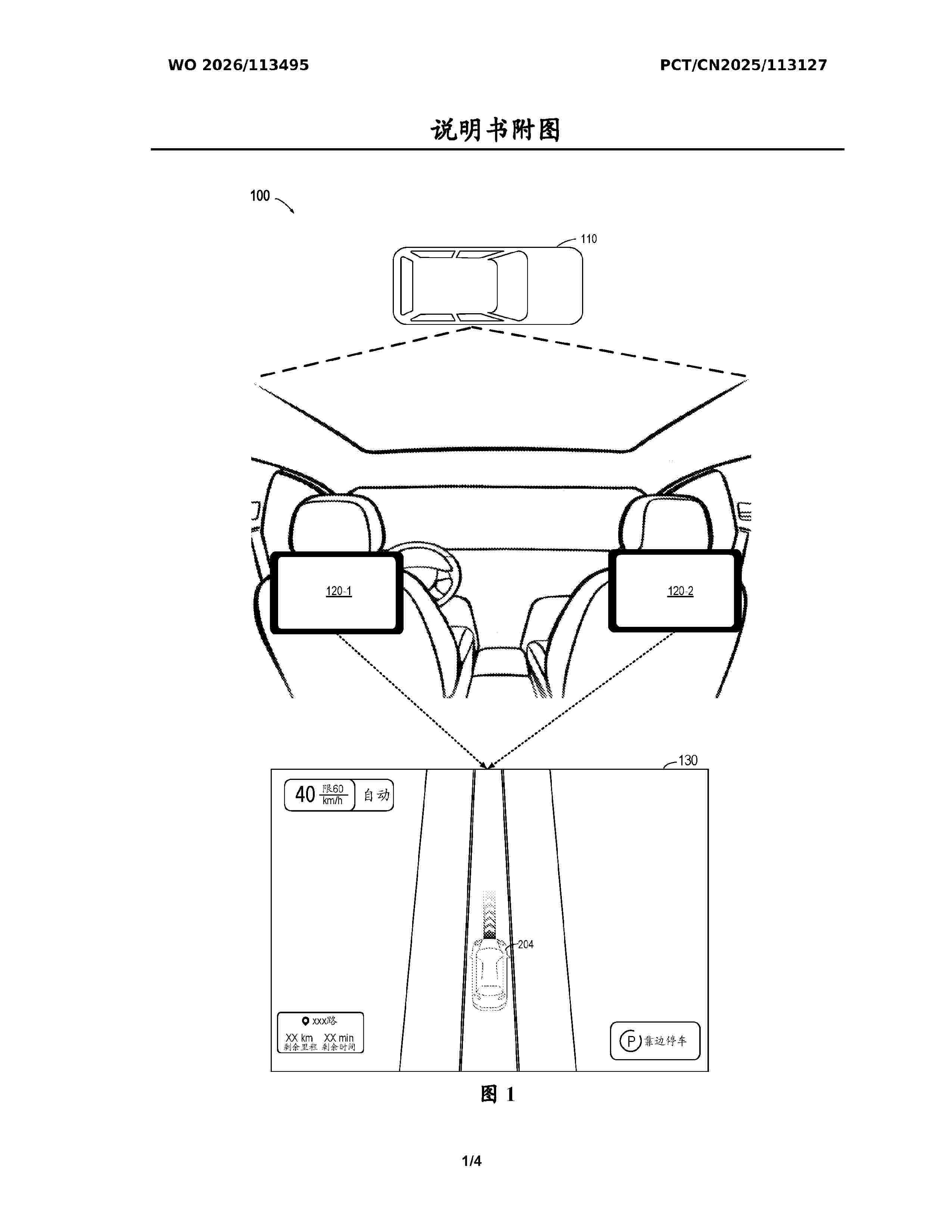
Resumen de: WO2026113495A1
The embodiments of the present disclosure relate to a method and apparatus for a travel service, and a device and a storage medium. The method provided herein comprises: during a target trip served by an autonomous vehicle, in response to the autonomous vehicle triggering parking, determining a parking scenario of the autonomous vehicle; in response to a target condition corresponding to the parking scenario being met, sending a prompt to a user associated with the target trip; and in response to no feedback of the user for the prompt being received within a target duration, generating a first remote assistance request associated with the autonomous vehicle, wherein the target duration is related to a parking position of the autonomous vehicle. In this way, the embodiments of the present disclosure can improve the service reliability of an autonomous vehicle.
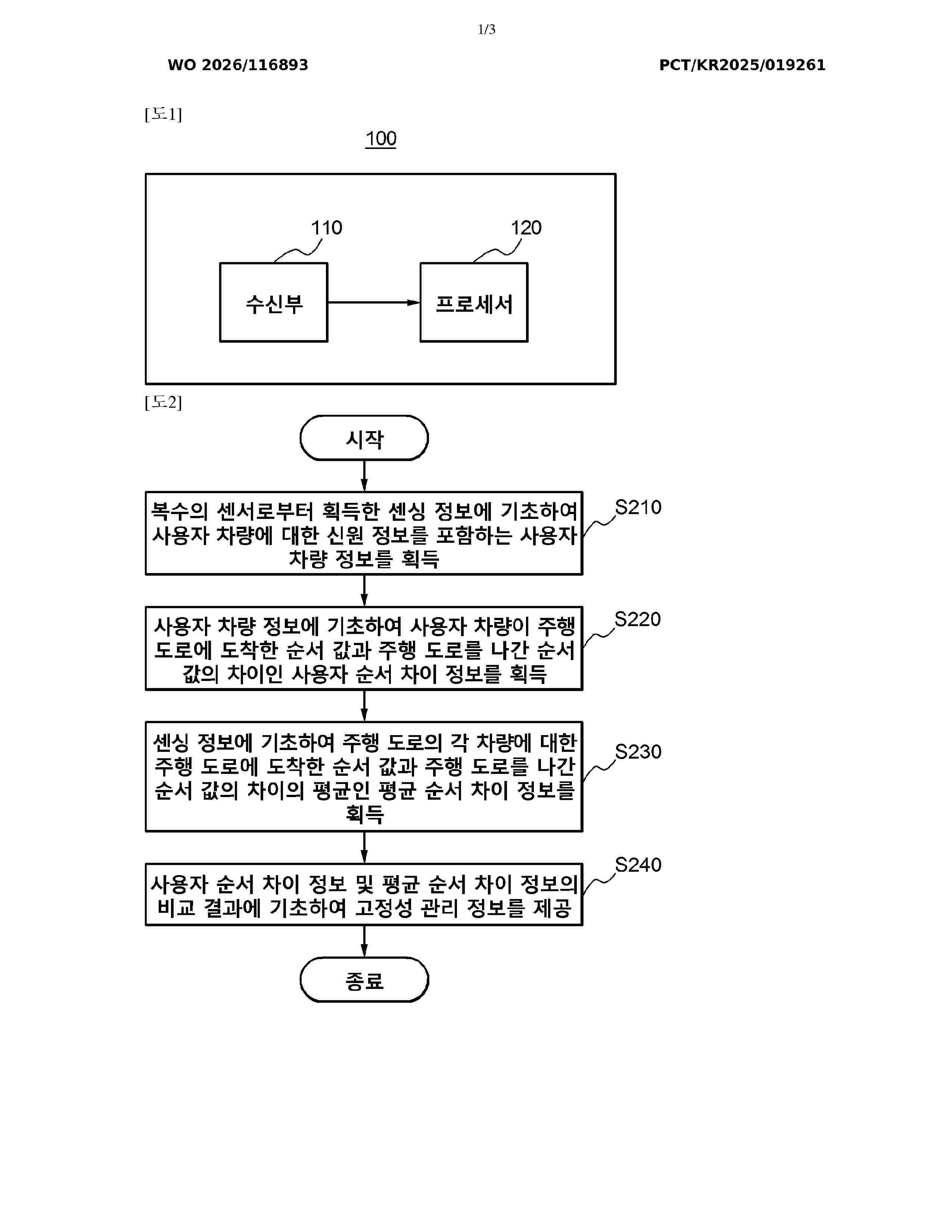
Resumen de: WO2026116893A1
Disclosed are a method and a device, the method comprising the steps of: acquiring, by a processor, user vehicle information including an arbitrary ID for a user vehicle on the basis of sensing information acquired from a plurality of sensors; calculating, by the processor, how long the user vehicle remains on a road on which the user vehicle is traveling, and assigning a fairness point; and providing, by the processor, fairness management information by storing, deleting, transmitting, or comparing the fairness point of the user vehicle.
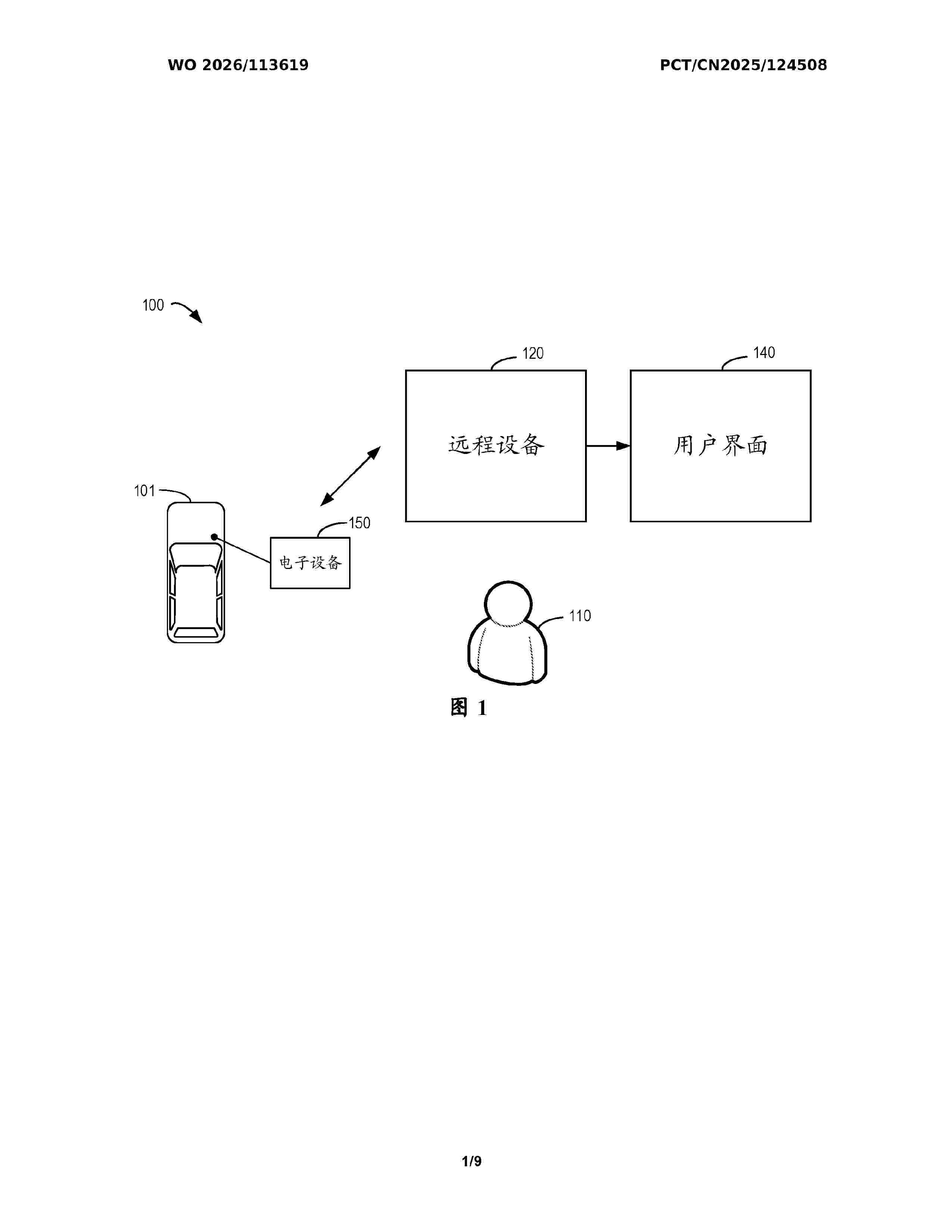
Resumen de: WO2026113619A1
A remote assistance method and apparatus, and a device and a storage medium. The method comprises: in response to an autonomous vehicle (101) being in a stuck state, determining a parking attribute of a target vehicle associated with the stuck state (202), wherein the parking attribute indicates whether the target vehicle is a temporarily parked vehicle (204); in response to the parking attribute of the target vehicle meeting a first condition, determining a lane state of an adjacent lane of the autonomous vehicle (208), wherein the lane state indicates a traffic direction and/or a traffic state of the adjacent lane; and in response to the lane state meeting a second condition (210), triggering the sending of an assistance request associated with the stuck state to a remote device (206).
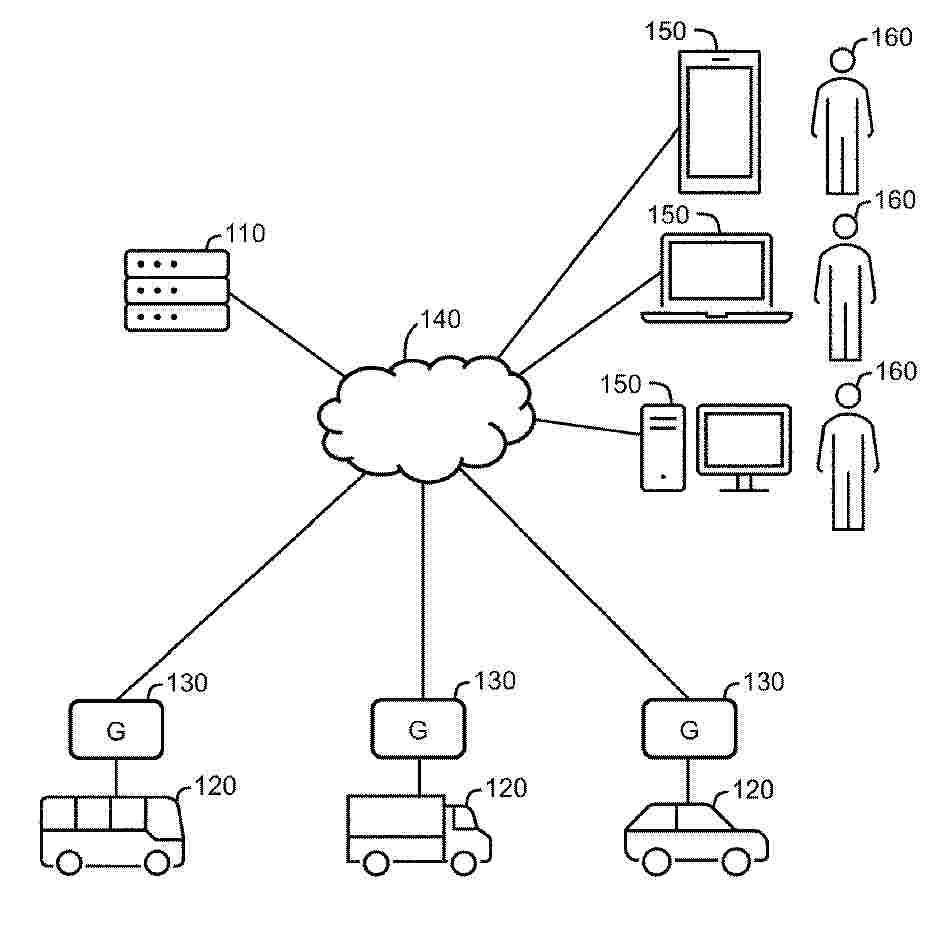
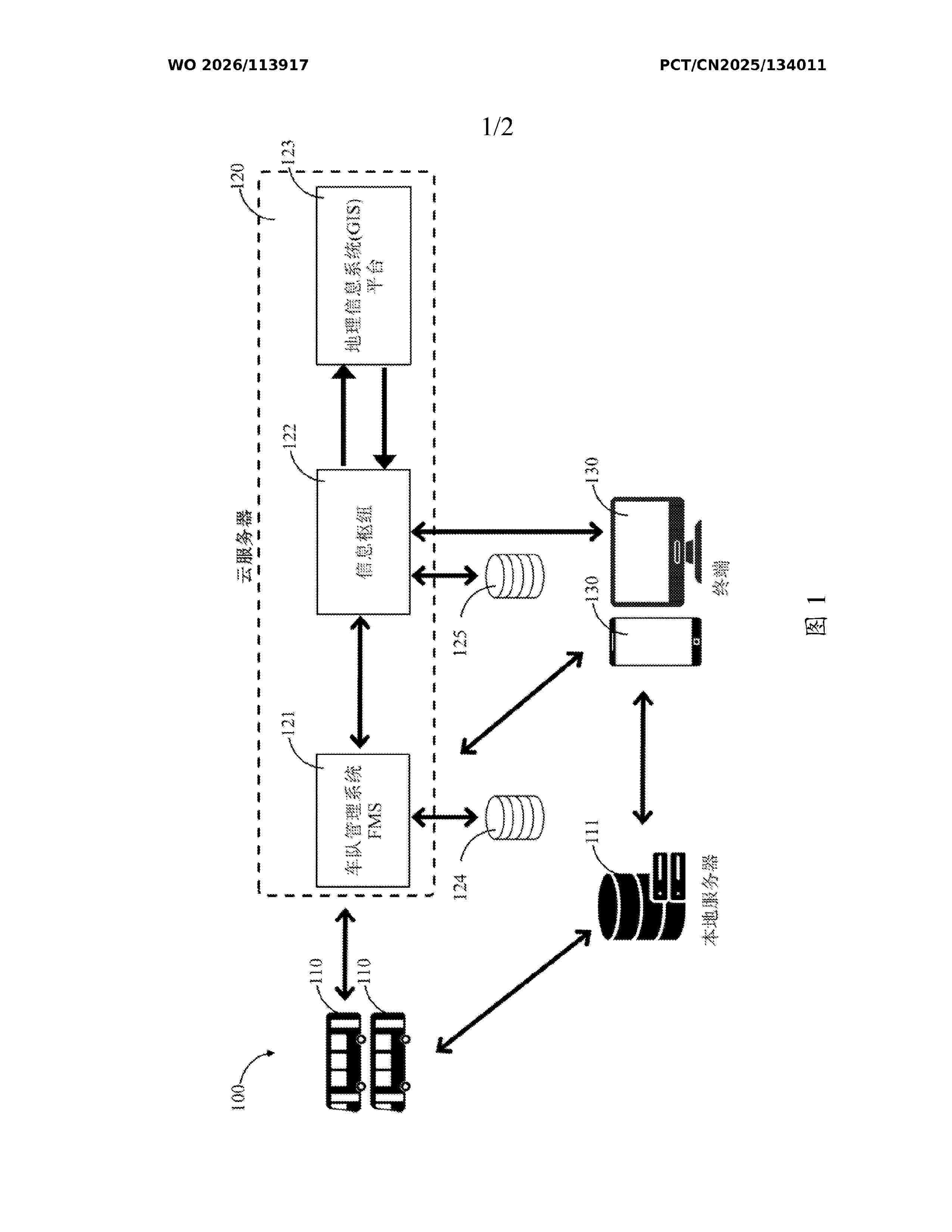
Resumen de: WO2026113917A1
A system and method for monitoring a road traffic jam and/or a traffic accident risk. The system comprises: a plurality of vehicle-mounted sensors (110); a cloud server (120), comprising a fleet management system (121), an information hub (122), and a geographic information system platform (123); and at least one terminal (130). The system and method support intelligent transportation/movement, improve overall road traffic safety, and further promote the development of smart cities.
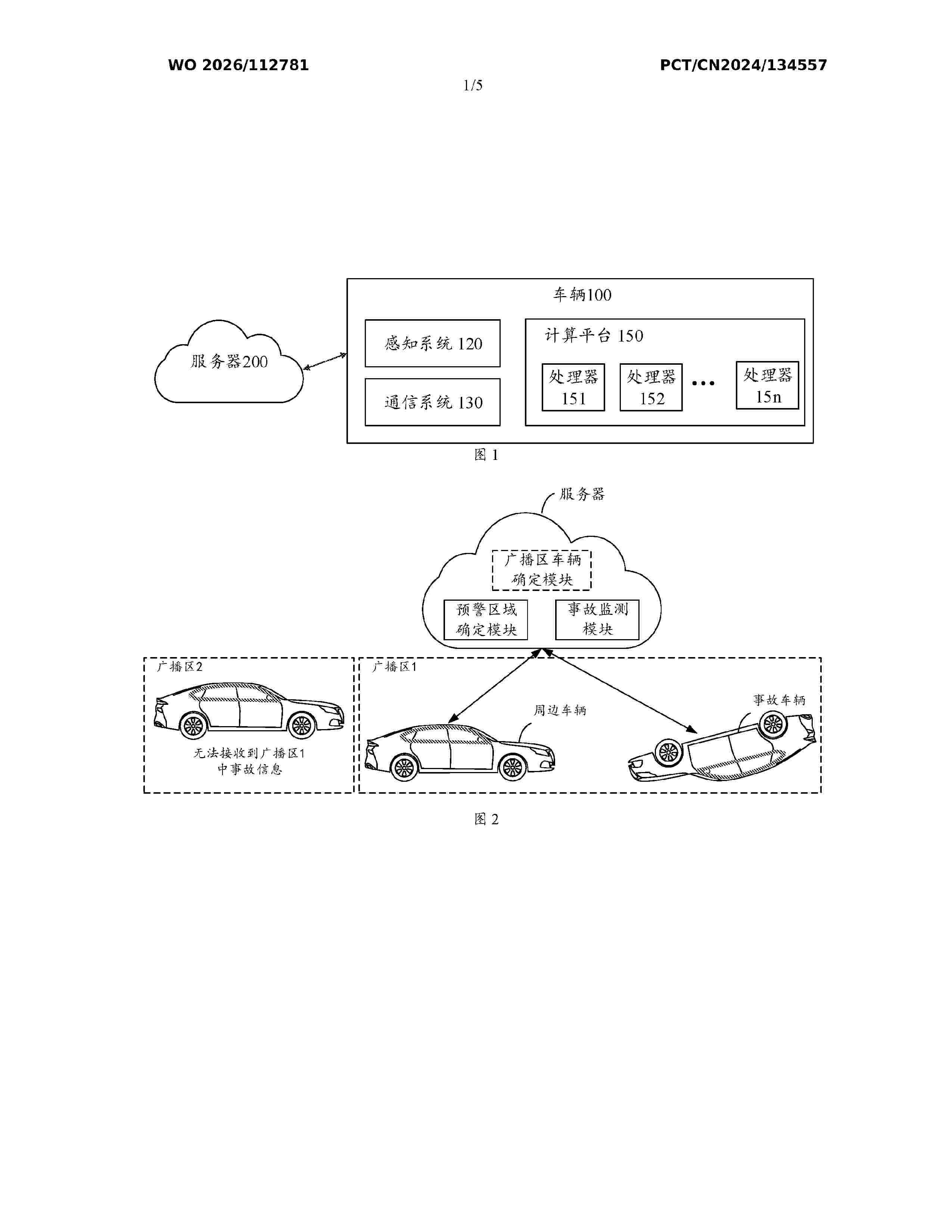
Resumen de: WO2026112781A1
An accident early warning method, apparatus and system. The method comprises: a server receives road anomaly information indicating a position where an accident occurs, and on the basis of the road anomaly information, determines a first broadcast area to which the accident belongs and a first early warning area, wherein the first early warning area is an area where a vehicle is instructed to report vehicle state information, and the vehicle state information comprises a vehicle speed and is used for determining the degree of road congestion caused by the accident; the server broadcasts, to a vehicle in the first broadcast area, accident indication information that indicates the first early warning area. The vehicle in the first broadcast area performs, at least on the basis of a positional relationship between the first early warning area and the ego vehicle, at least one of the following: sending the vehicle state information to the server, controlling an alert apparatus of the ego vehicle to provide accident information, or controlling the ego vehicle to avoid the accident.
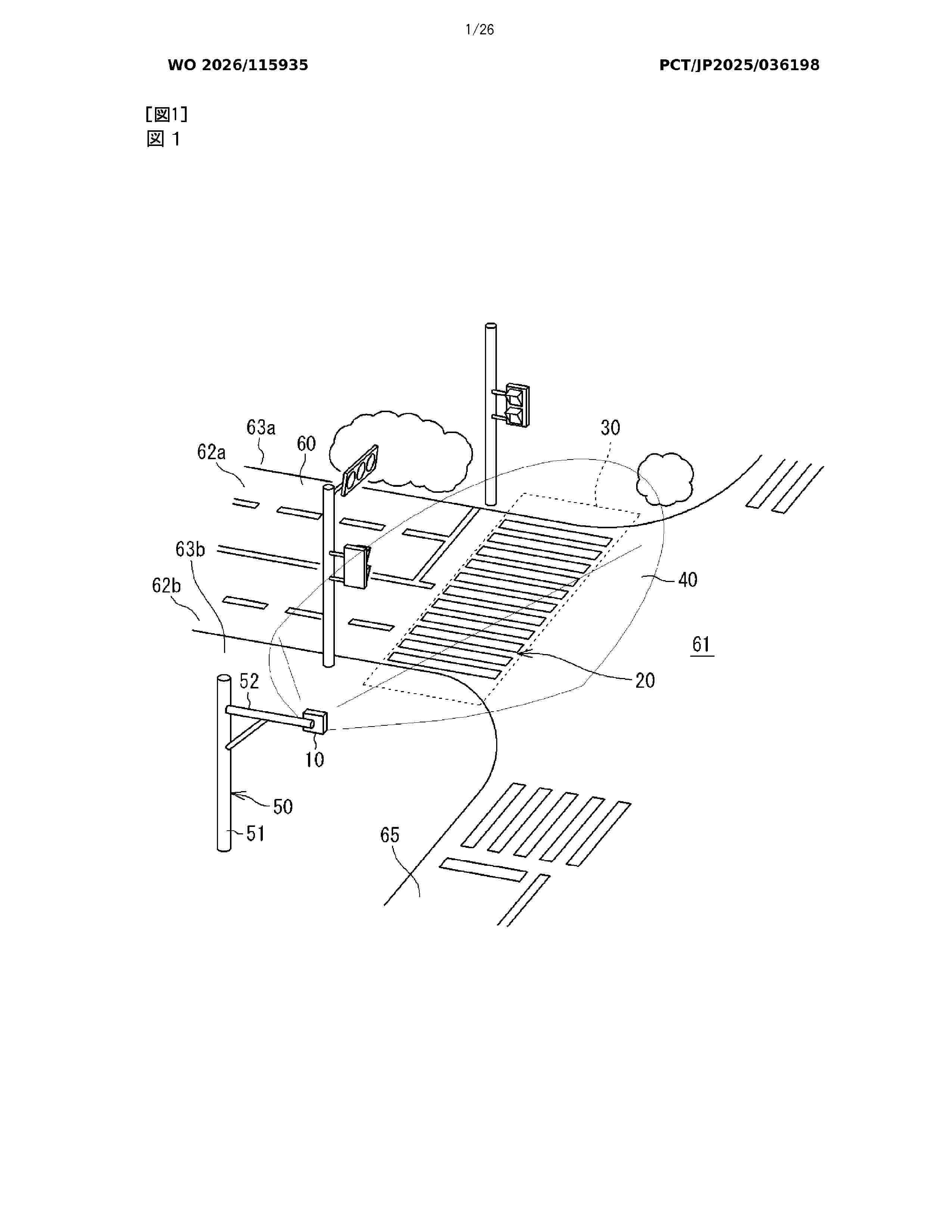
Resumen de: WO2026115935A1
This setting support device supports setting of a radio wave sensor that detects an object in a detection area by irradiating the detection area with radio waves, the detection area at least partially including a road. The setting support device comprises an acquisition unit that acquires detection results of a plurality of objects by the radio wave sensor, and an identification unit that identifies a low reliability result, which is a detection result having reliability lower than a standard, from the detection results of the plurality of objects acquired by the acquisition unit.
Resumen de: WO2026116680A1
The present invention relates to a traffic law violation monitoring system comprising: a sensor unit including a camera and a LiDAR; a preprocessing unit for preprocessing sensor data output from the camera and the LiDAR of the sensor unit; an object detection unit for detecting an object from the data preprocessed by the preprocessing unit; a bad weather detection unit for determining bad weather by using object detection result data output from the object detection unit; an object tracking unit for tracking the object detected by the object detection unit, wherein the object is tracked by using bad weather determination result data from the bad weather detection unit; an unexpected situation determination unit for determining whether there is an unexpected situation, by using object tracking result data output from the object tracking unit; and a traffic law violation determination unit for determining whether there is a traffic law violation for the unexpected situation determined by the unexpected situation determination unit.
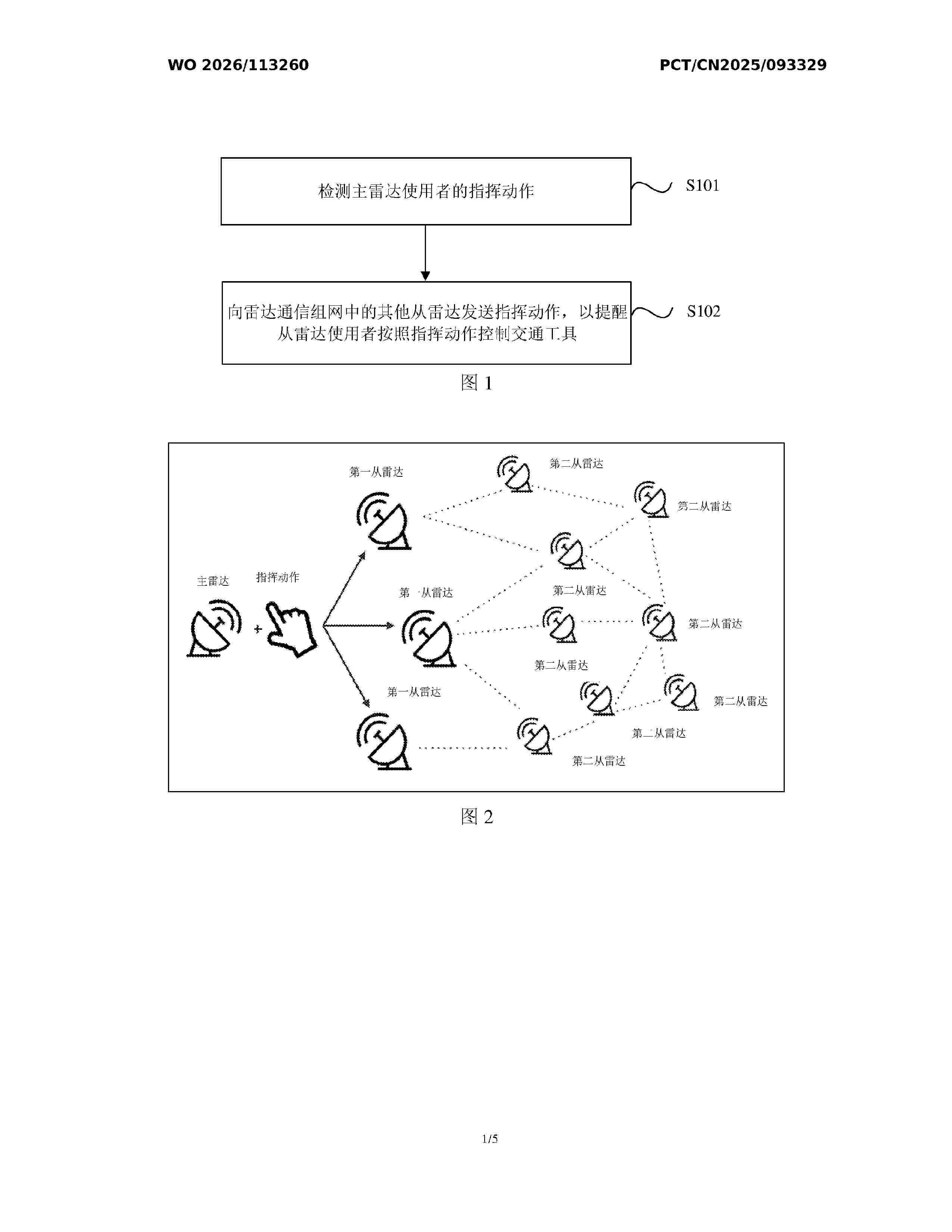
Resumen de: WO2026113260A1
Embodiments of the present application relate to the technical field of radar communications, and provide a radar communication method, a system, an apparatus, a device, and a storage medium, applied to slave radars in a radar communication network. The radar communication network further comprises a main radar. The method comprises: detecting a command action of a main radar user; and sending the command action to other slave radars in a radar communication network, so as to remind slave radar users to control vehicles on the basis of the command action. In the present application, by real-time detecting and transmitting the command action of the main radar user, rear slave radar users can timely obtain the intention of the main radar user, so that corresponding measures can be taken in advance, thereby reducing the probability of traffic accidents, and further enhancing the travel safety and user experience; in addition, automated radar detection and information transmission reduces the reliance on visual observation or verbal communication, so that the radar users can control vehicles more attentively, further enhancing the travel safety and user experience.
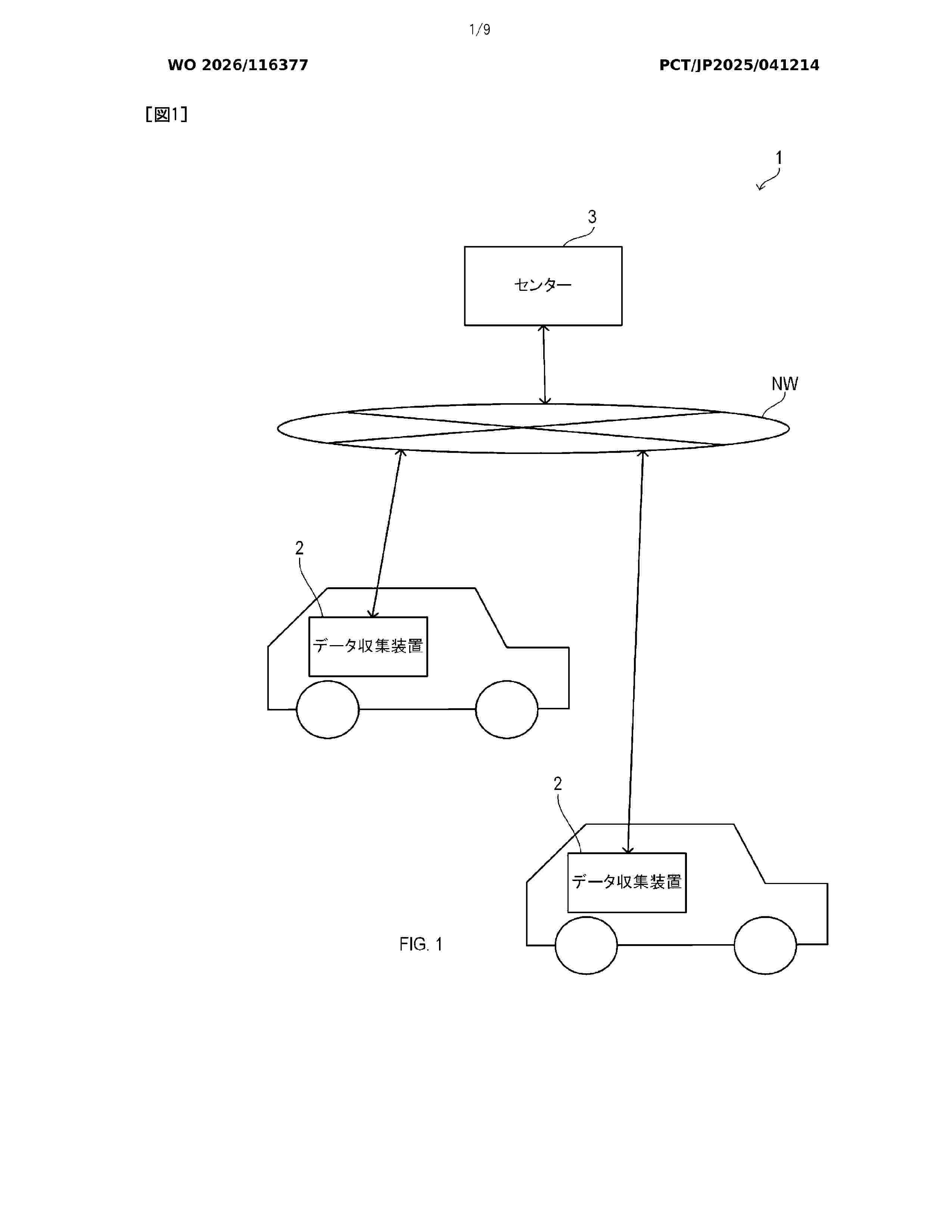
Resumen de: WO2026116377A1
A data collection system (1) comprises a plurality of in-vehicle devices (2) and a center (3). The in-vehicle devices are mounted respectively in a plurality of vehicles and transmit vehicle data, including at least information relating to the vehicles in which the in-vehicle devices are mounted. The center (3) receives the vehicle data from the in-vehicle devices. The center is provided with an acquisition unit (S10) and a dataset creation unit (S20 to S160). The acquisition unit acquires dataset requirement data indicating a dataset requirement defining a dataset including a plurality of pieces of vehicle data to be used for model training of a machine learning model. The dataset creation unit collects a plurality of pieces of vehicle data from the plurality of in-vehicle devices, and creates a dataset that satisfies the dataset requirement using the collected plurality of pieces of vehicle data.
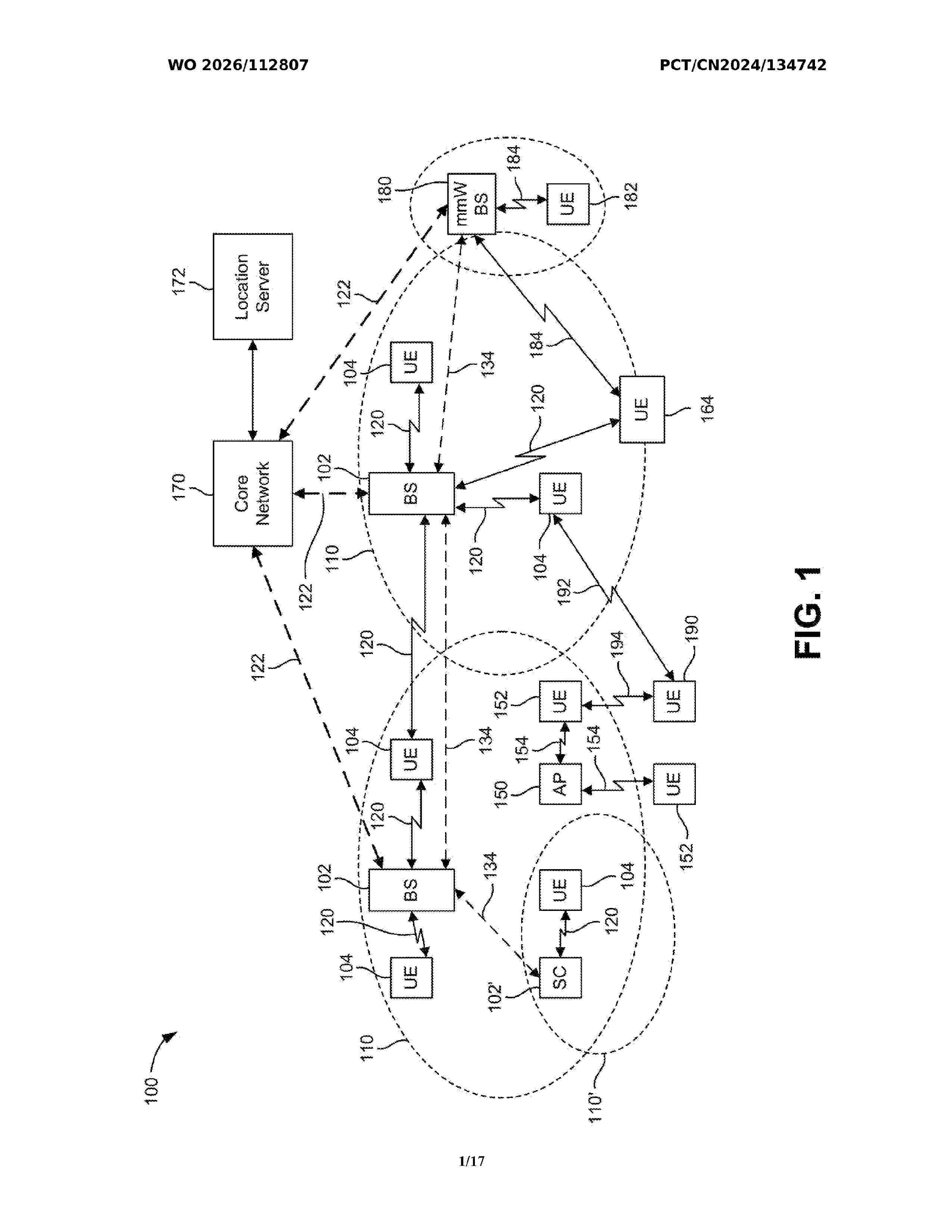
Resumen de: WO2026112807A1
Systems and techniques are described herein for wireless communications. For example, a computing device can receive a respective digital twin model of each of one or more second vehicles. The computing device can determine, based on the respective digital twin model of each of the one or more second vehicles, respective driving instructions for each of the one or more second vehicles. The computing device can transmit, to each of the one or more second vehicles, the respective driving instructions for each of the one or more second vehicles.
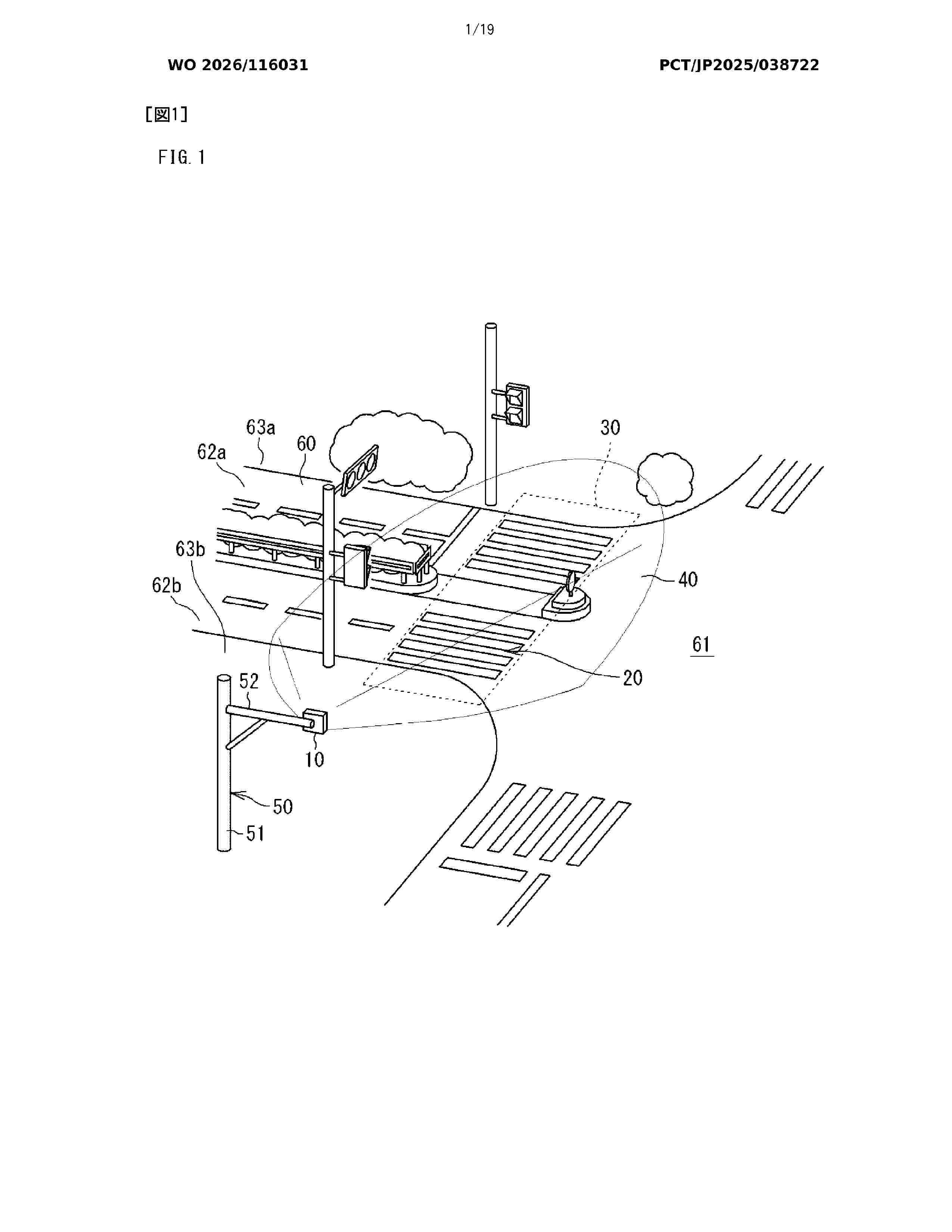
Resumen de: WO2026116031A1
This radio wave sensor detects an object in a detection area at least partially including a road by irradiating the detection area with radio waves. The radio wave sensor comprises: a transmission antenna that irradiates the detection area with radio waves; a reception antenna that receives a reflected wave of the radio waves, which have been radiated from the transmission antenna and reflected by the object; an identification unit that identifies a reflection point at which the radio waves have been reflected, on the basis of the received reflected wave; a determination unit that determines whether the identified reflection point is a multiple reflection point resulting from multiple reflection; and a detection unit that detects an object in the detection area on the basis of the reflection point. The determination unit determines whether a determination condition for determining that the reflection point is the multiple reflection point is satisfied, and determines that the reflection point is the multiple reflection point if the determination condition is satisfied.
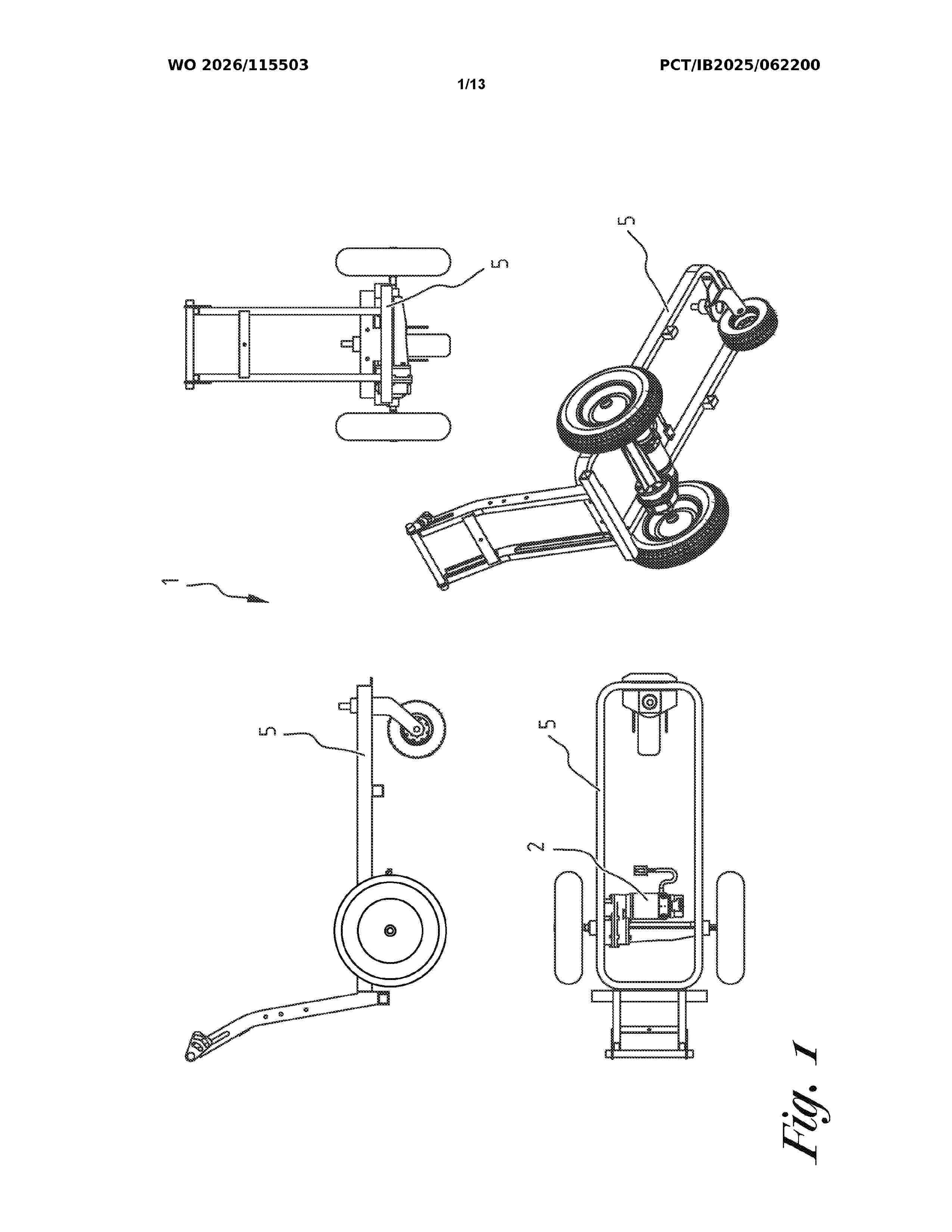
Resumen de: WO2026115503A1
The invention relates to a surface marking system (1) for the application and UV curing of a surface marking, the system (1) comprising at least one paint applicator (6), at least one LED UV lamp array (4), an on-board rechargeable power pack (3) and an air-cooling assembly, wherein the system (1) is operable to cure in a single pass, in ambient air and without the use of glass beads or other optically-transmissive fillers, a UV-curable coating having a dry-film thickness of up to 500 µm at a travel speed of at least 1 km/h. The invention further relates to a method of marking a surface with a surface marking system (1) of the invention.
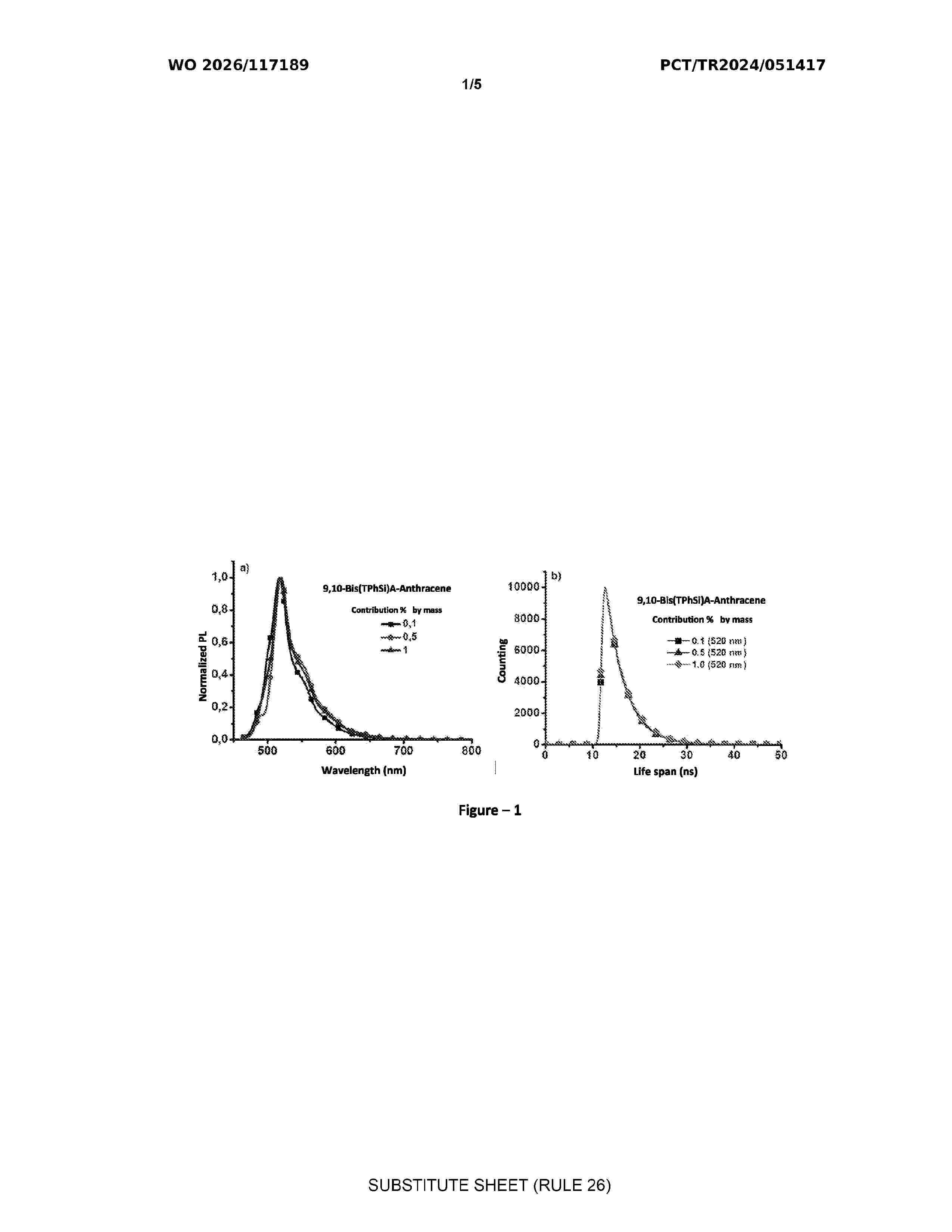
Resumen de: WO2026117189A1
Present invention relates to a method for producing green fluorescent paint for use as a lighting for energy-efficient highway lane and park markings, characterized as comprising following production steps; adding 9,10-dibromoanthracene, CuI, Pd catalyst, diisopropylamine and toluene in a reaction flask under nitrogen atmosphere and stirring them on a magnetic stirrer, adding tetraphenylsilanacetylenyl to the mixture and performing reflux distillation by increasing the reaction temperature, after 24 hours bringing the temperature to room temperature, obtaining pure product from the mixture brought to room temperature using column chromatography, taking 0-1% by mass of the product and mixing it in resin and an aromatic solvent for 6-24 hours.
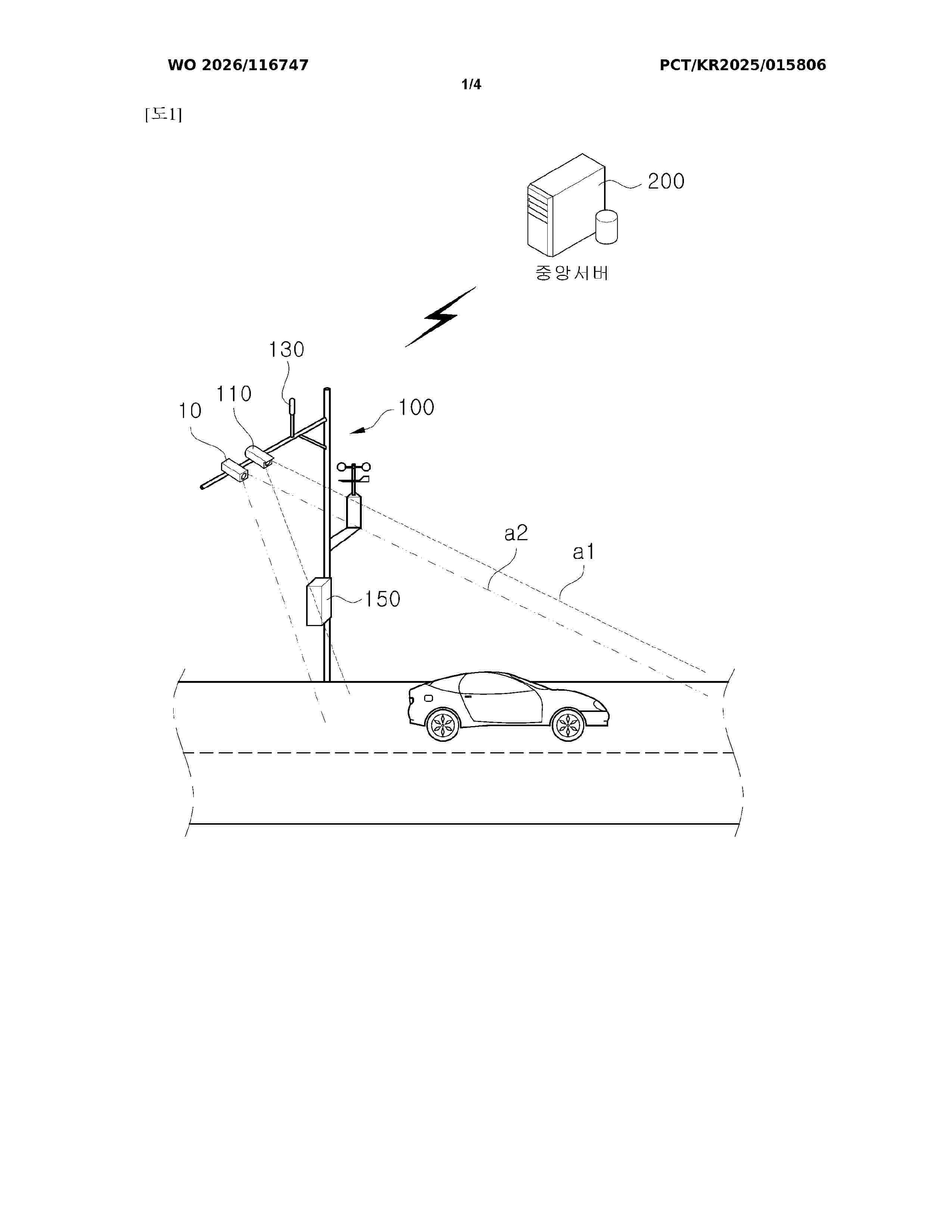
Resumen de: WO2026116747A1
Disclosed is a monitoring device. More specifically, the present invention relates to a monitoring device including a microphone array for detecting, in consideration of surrounding situations, sources of noise exceeding a threshold that may occur on outdoor roads, factories, and the like, and a noise control system using same. According to an embodiment of the present invention, a conventional CCTV camera, which is installed on a road to monitor vehicles in motion, is provided with a weather observation means and an outdoor noise measurement means, and there is an effect of detecting, by means of same, a sound source that generates noise greater than or equal to a threshold by determining surrounding conditions such as weather.
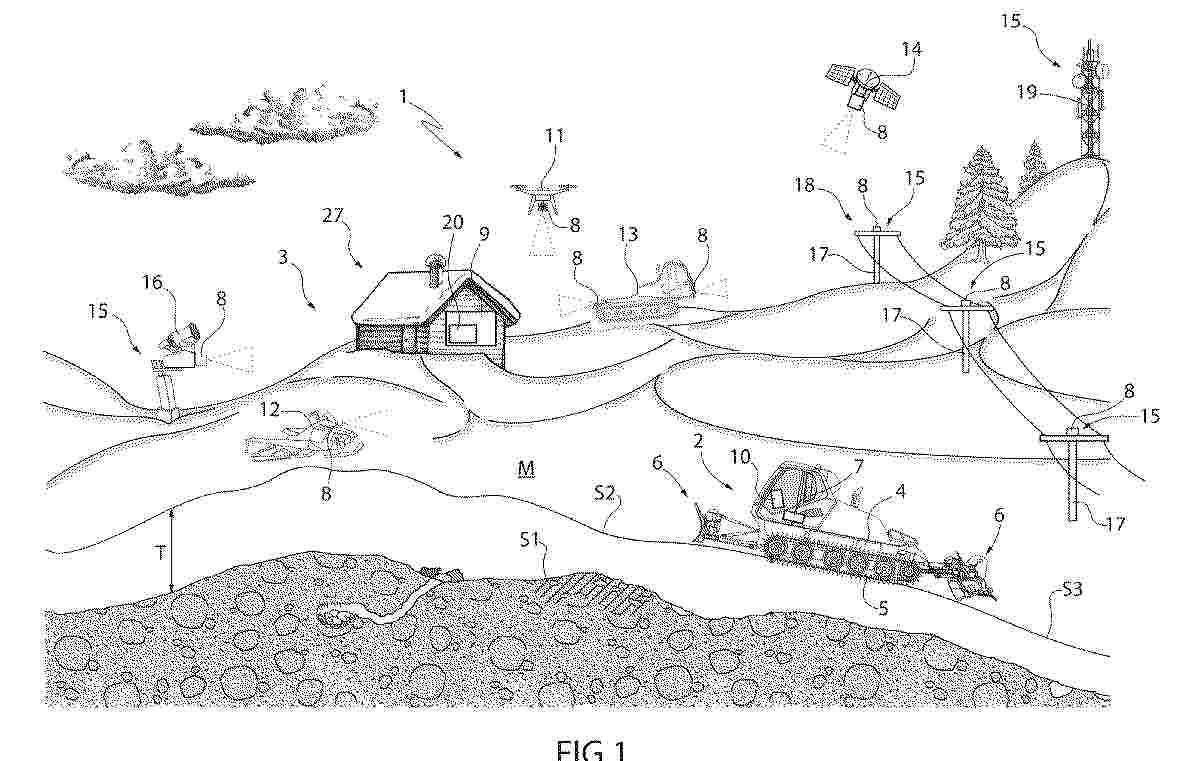
Resumen de: EP4752661A2
0001 A system for managing operations of a crawler vehicle in a working area has a crawler vehicle (2), which is configured to advance in the working area (3) and comprises a working tool assembly (6) and a control unit (7); at least one detection device (8), which is configured to detect operative data indicative of a status of the working area (3) and is separate from the crawler vehicle (2); and a processing device (9) configured to process the operative data detected by the at least one detection device (8), the control unit (7) of the crawler vehicle (2) being configured to perform at least one of the following actions: send information indicative of the processed operative data to an interface screen (10); control the advancement of the crawler vehicle (2) in the working area (3) as a function of the processed operative data; control the working tool assembly (6) as a function of the processed operative data.
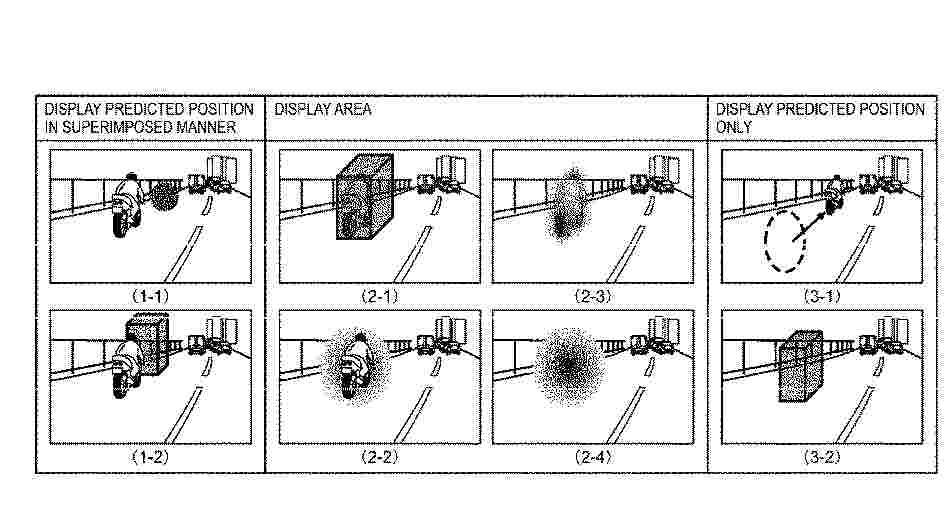
Resumen de: EP4752861A1
0001 The present disclosure relates to a signal processing device, a signal processing method, and a signal processing system that can improve the operability and safety of the remote operation. The current positions of a mobile body and a surrounding object located in a region around the mobile body considering communication delay time are predicted based on the position information, speed, and steering angle of the mobile body and information on the surrounding object, which are received through a communication with the mobile body, and a display image displaying a prediction result is created and displayed by switching the display method in accordance with the delay time. It is applicable to remote operation systems.
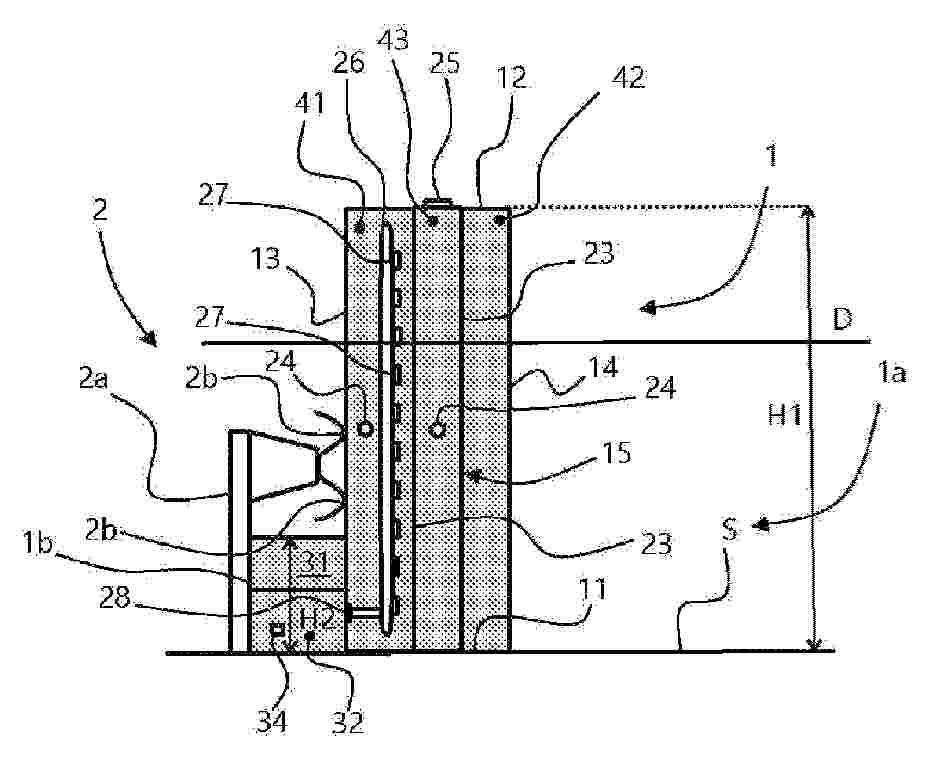
Resumen de: WO2025022250A1
The invention relates to a safety cushion (1) comprising a protective cushion (1a) which contains a pressurized gas and which is delimited by a lower wall (11), an upper wall (12), a rear wall (13), a front wall (14) and side walls (15) and which has a rear compartment (41), a front compartment (42) and at least one intermediate compartment (43) interposed between the rear compartment (41) and the front compartment (42), two adjacent compartments (41, 42, 43) being separated from each other by an inner wall (23), characterized in that the inner wall (23) is parallel to the rear wall (13) and the front wall (14). The safety cushion (1) also comprises a secondary cushion (1b) interposed between the protective cushion (1a) and a safety barrier (2).
Nº publicación: EP4752282A1 03/06/2026
Solicitante:
SEGURVITAL ROADS S L [ES]
MARTIN ALVAREZ RICARDO [ES]
Segurvital Roads, S.L.
Martin Alvarez, Ricardo
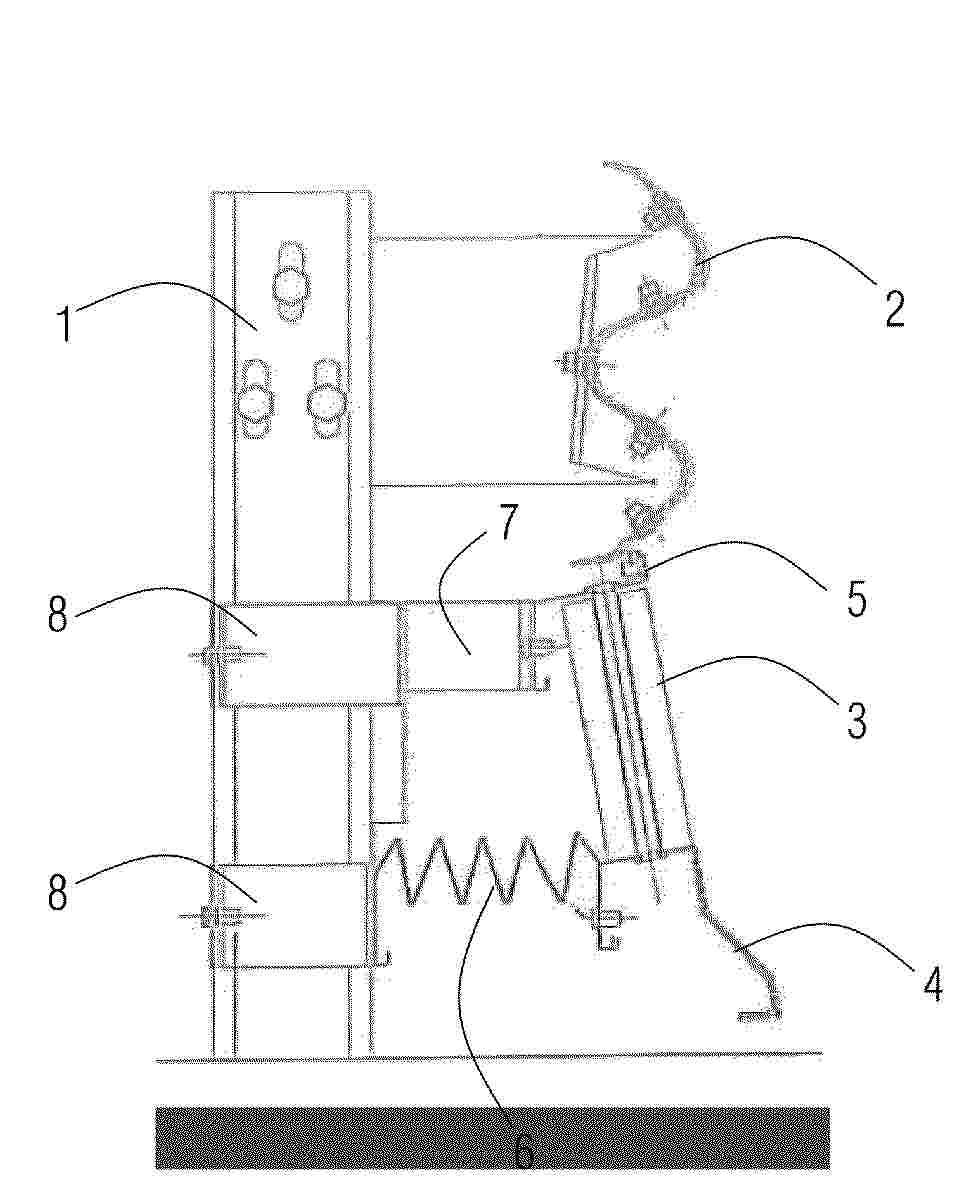
Resumen de: EP4752282A1
0001 The invention relates to an impact absorption system designed to be installed in structures fixed to the ground by means of vertical posts and intended to minimize damage resulting from accidental collisions. The system incorporates a series of rollers arranged vertically and aligned longitudinally, whose function is to allow rotation upon impact to reduce friction and disperse energy. These rollers are supported by a lower longitudinal piece that supports their lower ends and an upper longitudinal piece that supports the upper ends, guaranteeing their stability and turning capacity. Both pieces extend between the posts following the same alignment. The system also includes a lower spring and an upper spring, each one anchored at one end to a post and at the other end to the corresponding longitudinal pieces. This configuration absorbs deformations, improves damping and increases structural safety.
 BOPI
BOPI
 Sede Electrónica
Sede Electrónica