Si deseas distinguir tus productos, servicios o ambos de los de otra empresa, es posible que necesites una marca o nombre comercial. Descubre qué son, en qué consiste su procedimiento de registro y qué implica.

Información sobre los plazos de presentación de solicitudes de transformación de marcas de la Unión Europea en marca nacional española. Más información


Si tienes un nuevo dispositivo, producto o procedimiento que resuelva un problema técnico o tenga una ventaja práctica, existen distintas formas de protegerlo en España y en otros países. Descubre cómo hacerlo.

¿Tu innovación reside en la estética, la ornamentación o la apariencia de tu producto? Protégela mediante un diseño industrial. Descubre qué derechos confiere el registro y cómo realizar la tramitación.

Las indicaciones geográficas protegen el nombre de un producto originario de una zona geográfica, a la cual le debe una determinada calidad, reputación u otra característica. Descubre qué son, en qué consiste su procedimiento de registro y qué beneficios conceden.

Las patentes publicadas en todo el mundo son una valiosa fuente de información científica, técnica y comercial.

Si eres emprendedor/a o una empresa y quieres potenciar y mejorar la rentabilidad de tu negocio protegiendo de forma adecuada los activos intangibles de tu organización, en este espacio encontrarás lo necesario.



 116
resultados
116
resultados
 Última actualización
01/05/2026 [09:06:00]
Última actualización
01/05/2026 [09:06:00]



Resumen de: EP4481968A1
The invention relates to a cable connector system for connecting an electric power cable in a cable connector channel that debouches at a bottom of a floating marine platform, wherein the cable connector system comprises an insert connector for insertion into the cable connector channel, a cable hang-off to be fixated to the electric power cable, multiple pulling ropes that extend aside each other between the insert connector and the cable hang-off, and a cable protector on the cable hang-off, wherein the insert connector, the pulling ropes, the cable hang-off and the cable protector define subsequent cable passage sections of an internal cable passage for the electric power cable.

Resumen de: EP4733186A1
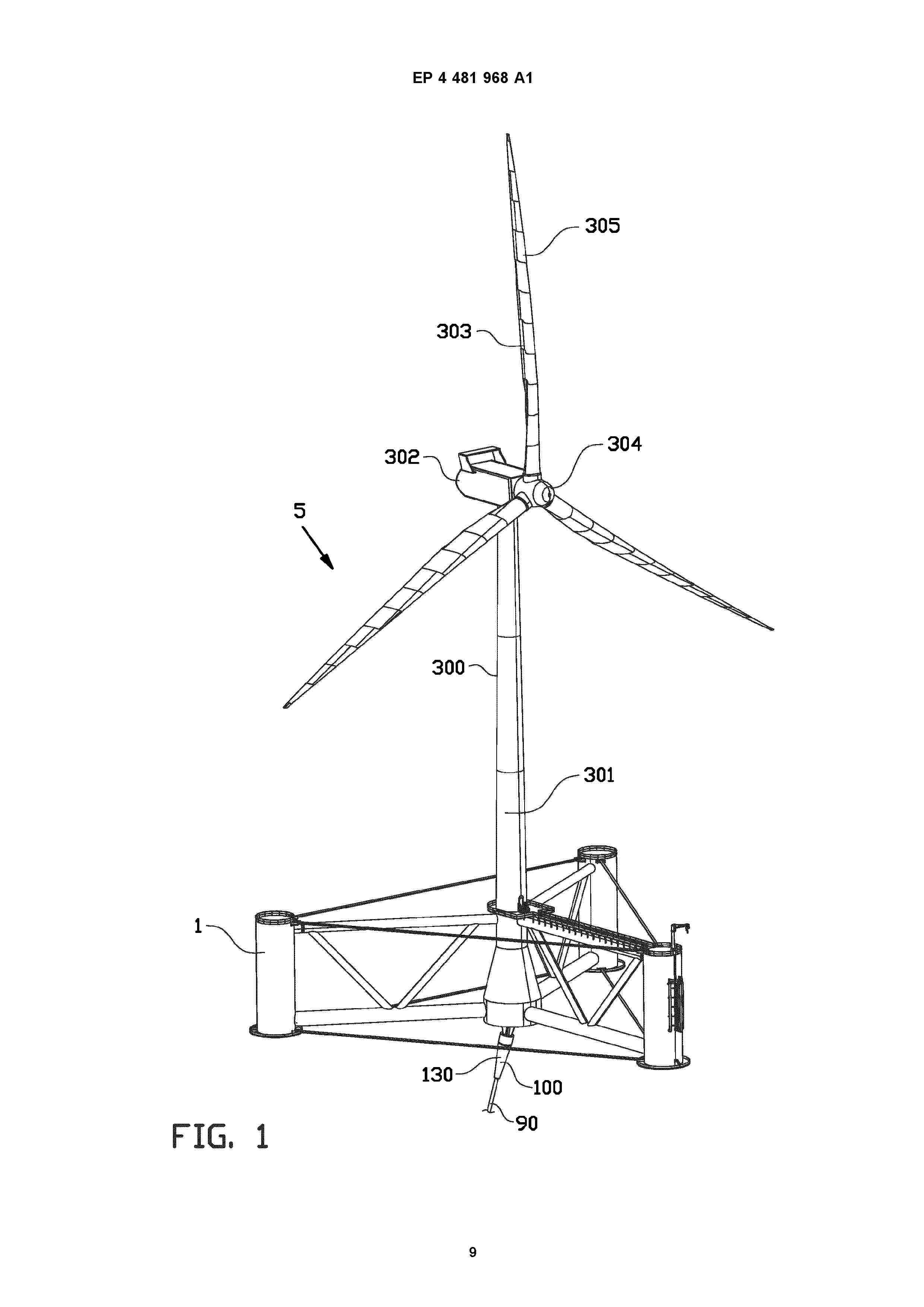
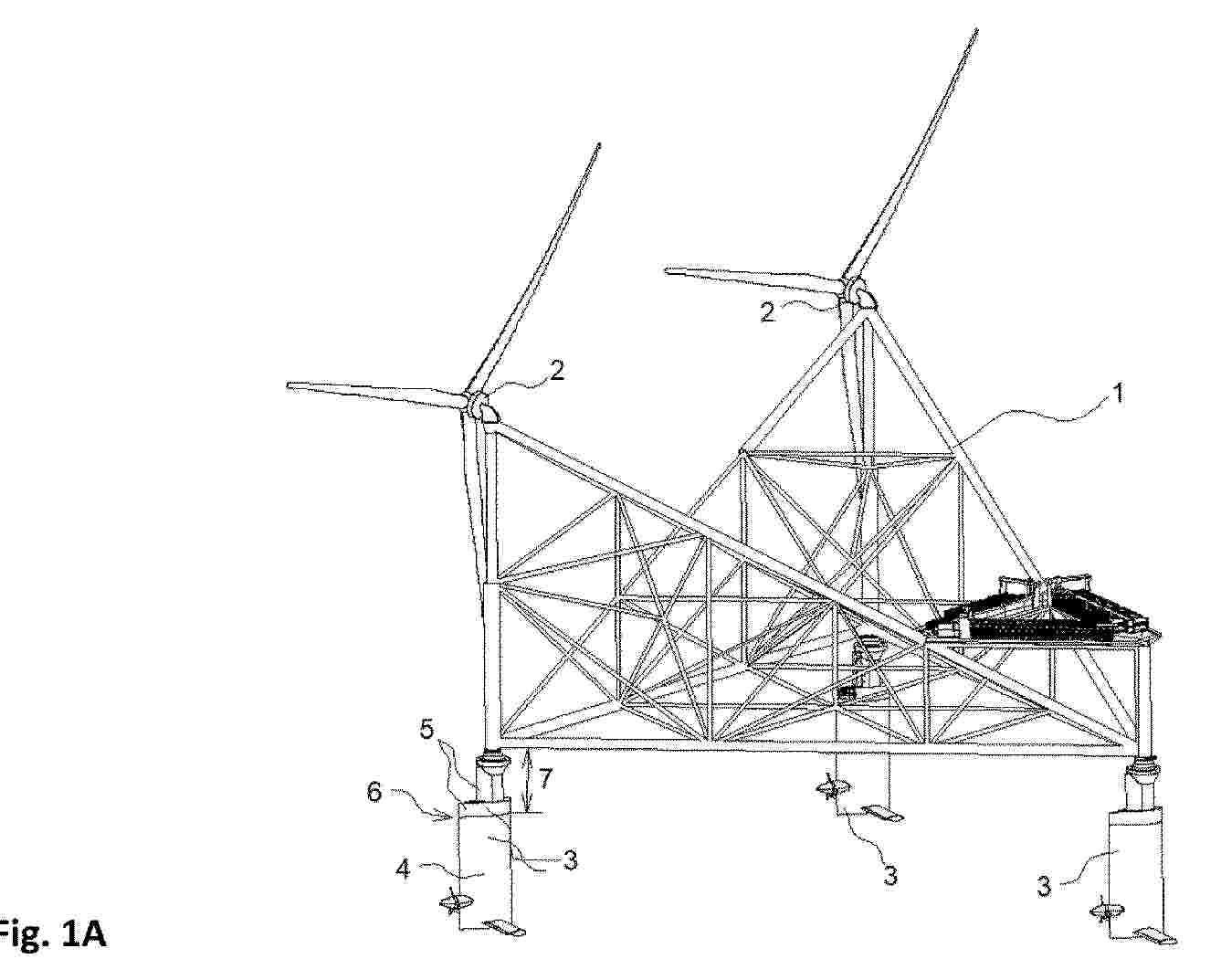
This disclosure relates to an unmoored floating wind turbine system comprising a connecting structure that bears one or more wind turbines, and at least three hulls or topological concentrations of buoyancy-force, wherein the connecting structure is configured to transmit moments and forces between the at least three hulls and the one or more wind turbines, and at least two lifting surfaces, such as foils and/or keels and/or fins and/or hulls, wherein the at least two lifting surfaces have separately controllable orientations relative to the structure for controlling a course direction of the unmoored floating wind turbine system and for controlling a heading of the connecting structure independently from the course direction.
Resumen de: WO2025006514A1
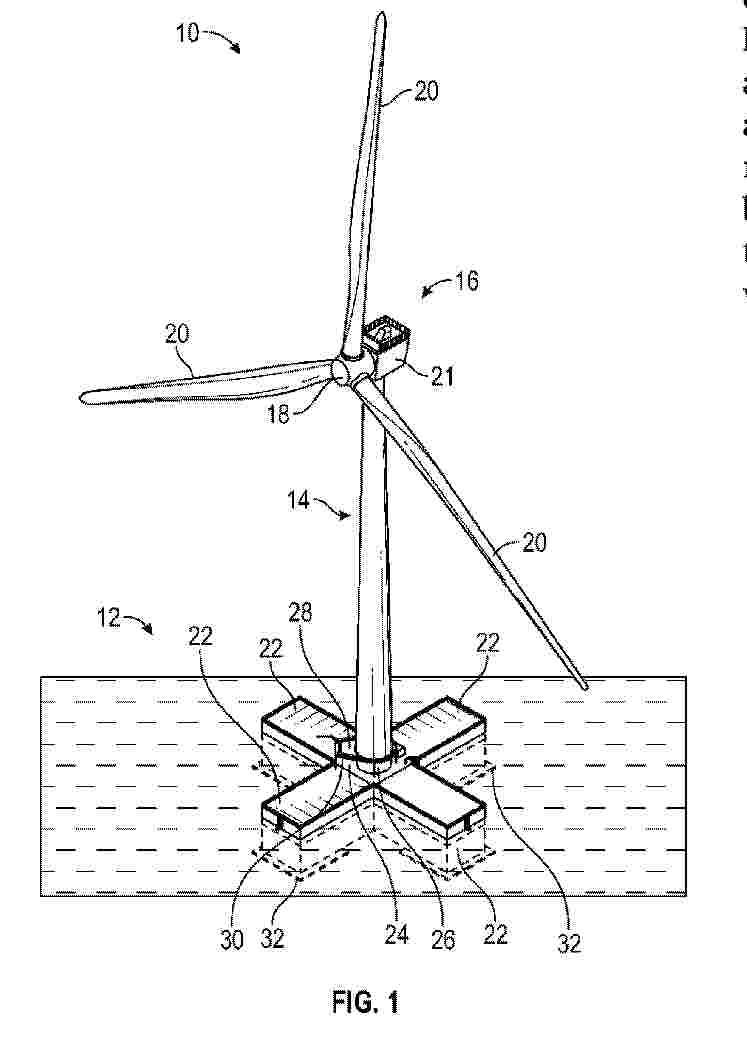
A barge-type wind turbine platform that is capable of floating on a body of water and supporting a wind turbine includes a keystone. The keystone includes a steel tube concentrically mounted within the keystone, and a plurality of radially extending diaphragms that extend vertically between a lower wall of the keystone and an upper wall of the keystone, and extend radially between the steel tube and side walls of the keystone. A plurality of bottom beams are connected to the keystone and extend radially outwardly thereof, and the combined keystone and bottom beams define a foundation. A wind turbine tower is mounted to the keystone.
Resumen de: US20260109633A1
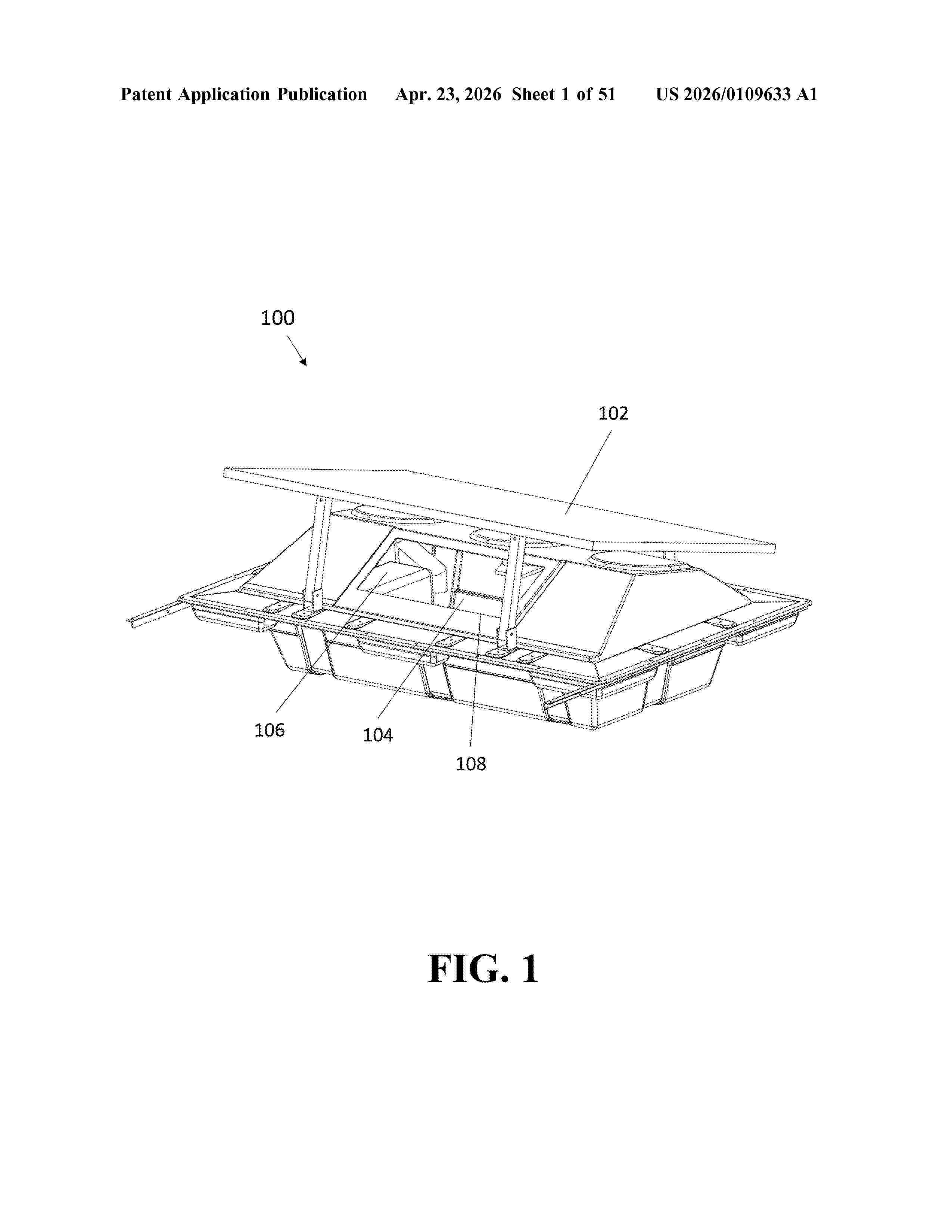
0000 Disclosed herein are devices, systems, and methods for water aeration and/or circulation, including, but not limited to, floating, onboard renewable energy-powered aeration for aquaculture ponds and/or other man-made and/or natural bodies of water (e.g., tanks, farm ponds, and reservoirs). In at least one embodiment, an aeration system has one or more photovoltaic (PV) panels to provide power to the aeration system. In at least one embodiment, the aeration system captures wind energy as an optional secondary power source. The aeration system may be either a battery-power or a direct-power system. The aeration system may also provide programmable settings. The system can be modular and scaled and/or customized to fit user needs. The aeration system may also include one or more float modules having an internal cavity, one or more pontoons and/or pontoon accessories for blocking and/or directing air and/or water flow, and/or one or more novel diffusers.
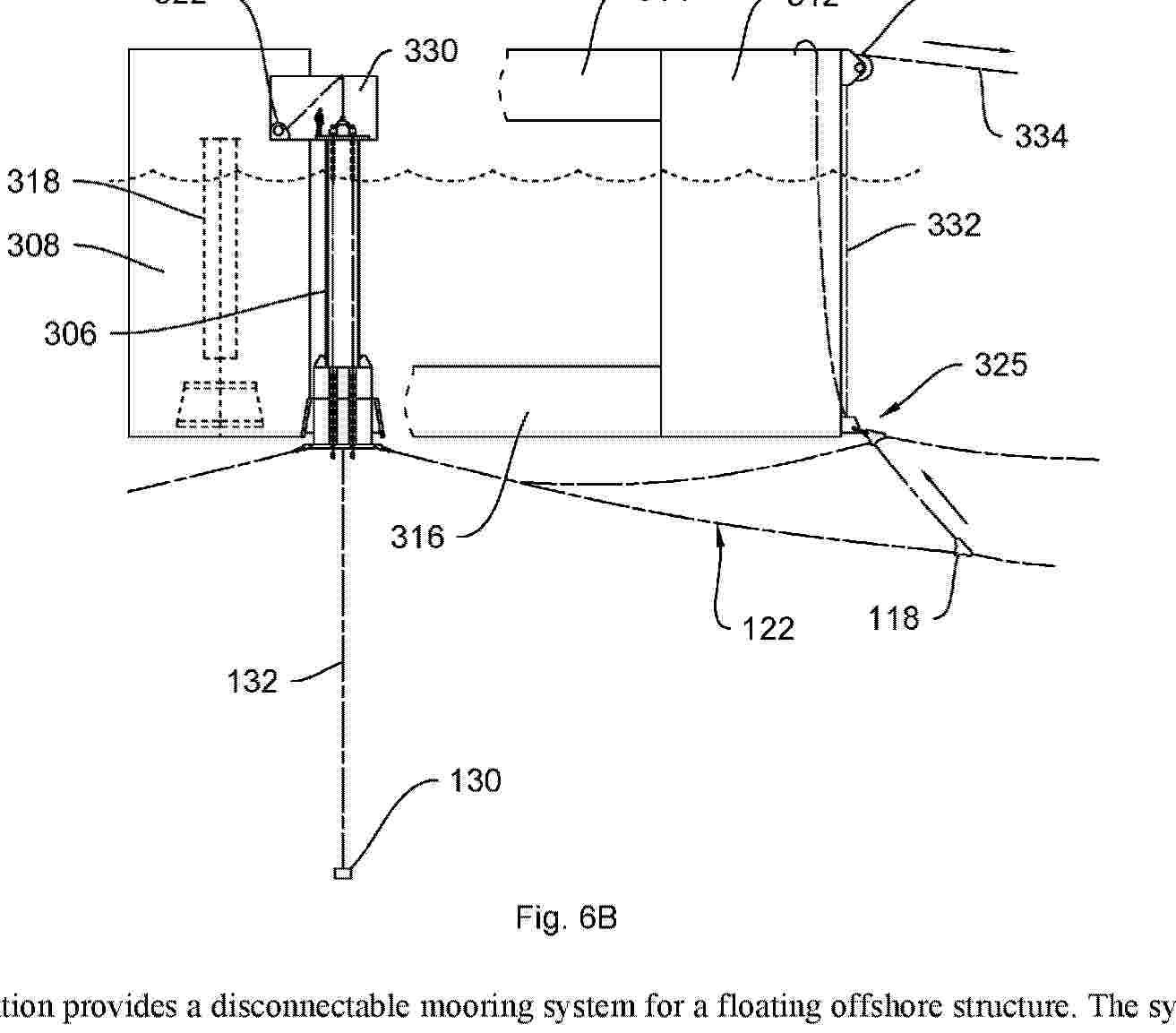
Resumen de: AU2024354901A1
The invention provides a disconnectable mooring system for a floating offshore structure. The system may comprise: a buoy comprising a connector which enables connection and disconnection of the buoy from the floating structure. The system has a disconnected configuration in which the buoy is not connected to the floating structure and the buoy at least partially supports a dynamic riser conduit above the seabed. The system has a connected configuration in which the buoy is connected to the floating structure; and wherein the system is configured to enable pull-in of the buoy to the connected configuration and pull-in of the dynamic riser to a connection position. Aspects of the invention include related pull-in sequences, independent through connection of first and second dynamic riser conduits, and conductive coupling of a dynamic riser conduit to a floating structure. Further aspects of the invention include related rapid / emergency disconnect systems and methods, use a clump weight in an installation sequence, connection structures and buoy configurations, and rope connectors.
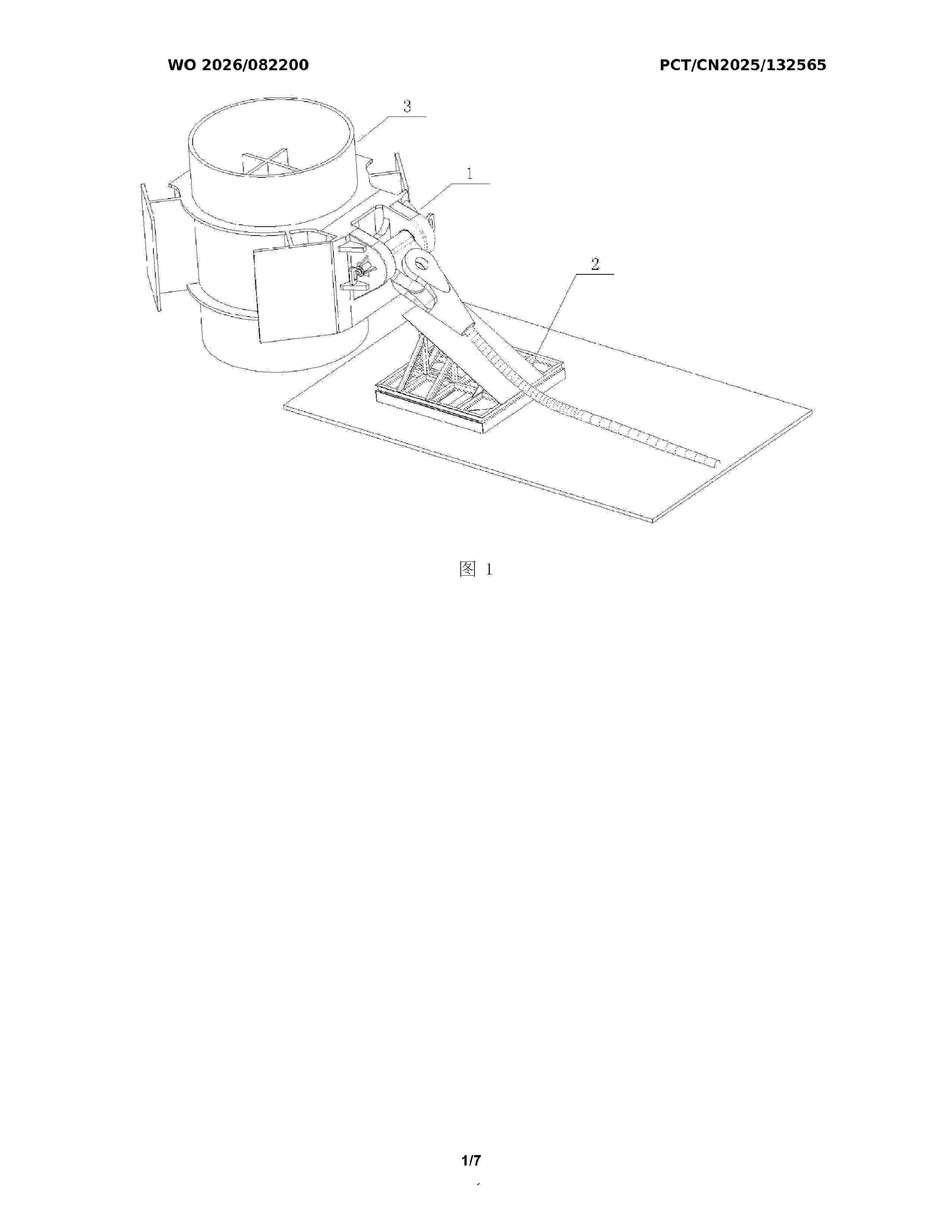
Resumen de: WO2026082200A1
The present invention relates to the technical field of mooring connection of tension-leg floating wind turbine platforms. Disclosed is a pile foundation connection device for a tension-leg floating wind turbine platform. The pile foundation connection device comprises a bottom connection mechanism and a steel cable protection mechanism, wherein the bottom connection mechanism comprises a welding back plate, a tongue plate is provided on the welding back plate, the upper end of the tongue plate is connected to a steel cable socket by means of a pin shaft, and a steel cable is connected to the steel cable socket, such that the steel cable is capable of two rotational degrees of freedom; both ends of the tongue plate are locked and fixed by means of locking mechanisms; and the steel cable protection mechanism is located on one side of a pile foundation, and the steel cable is placed on the steel cable protection mechanism after the steel cable is connected, so as to prevent over-bending damage to the steel cable when same is pre-laid on the seabed. The present invention features a simple structure, a reliable performance and convenient operation, and can adapt to underwater quick connection; and the entire operation process only requires the assistance of one ROV, thereby simplifying the tie-back installation procedure of mooring lines and anchoring devices for a tension-leg wind turbine platform, and reducing the mooring and installation costs of the tension-leg wind turbine p
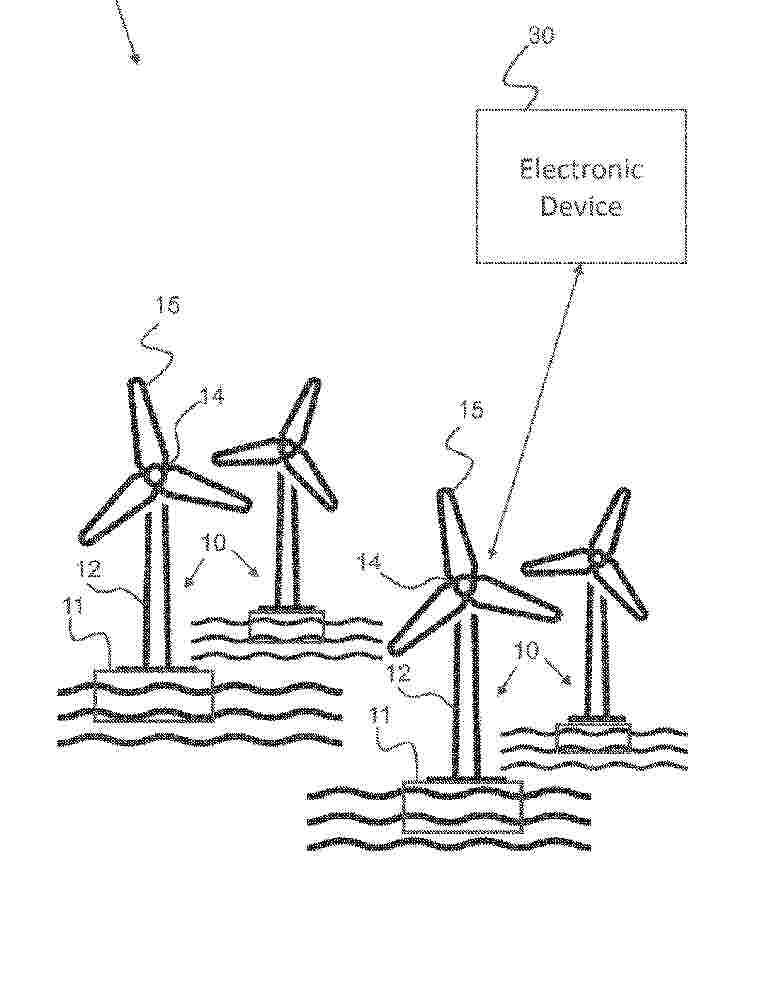
Resumen de: WO2024255979A1
Disclosed is a method for controlling a floating wind turbine system. The floating wind turbine system comprises a floating platform, a tower mounted to the floating platform and a nacelle. The method comprises receiving, from one or more sensors of the floating wind turbine system, a signal indicative of a vertical acceleration of the floating wind turbine system. The method comprises determining, based on the received signal, a sea state parameter indicative of an oscillation of the vertical acceleration. The method comprises controlling the floating wind turbine system based on the sea state parameter.
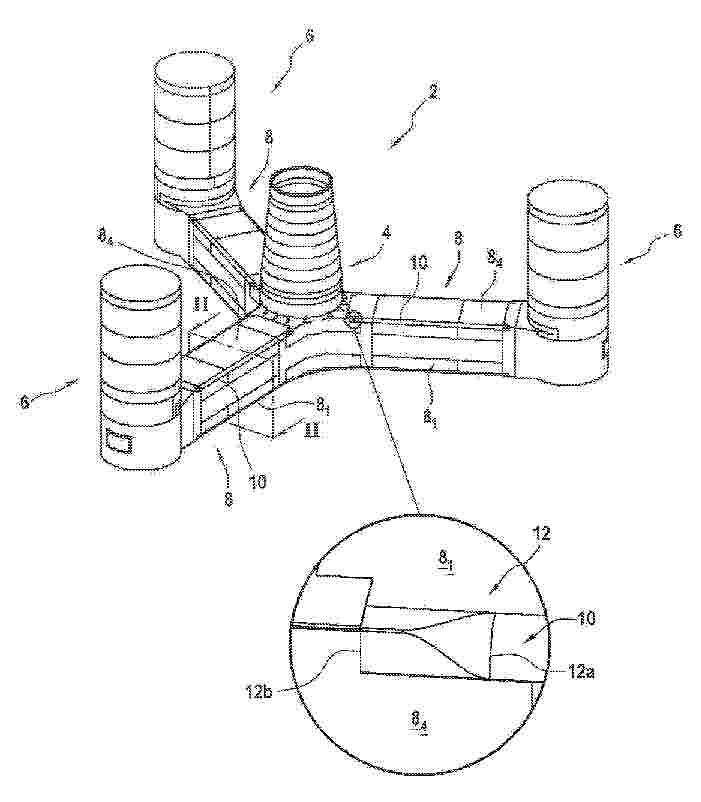
Resumen de: WO2024256782A1
The invention relates to a semi-submersible float (2) for an offshore wind turbine, comprising at least three vertical columns (4, 6), one of which is intended to receive a wind turbine mast, the vertical columns being connected together by pontoons (8) each formed by a plurality of planar panels (81 to 84) which are assembled together at edges (10) extending longitudinally between two columns, the edges of the pontoons being rounded and connected at each of their longitudinal ends to a column via a transition piece (12).
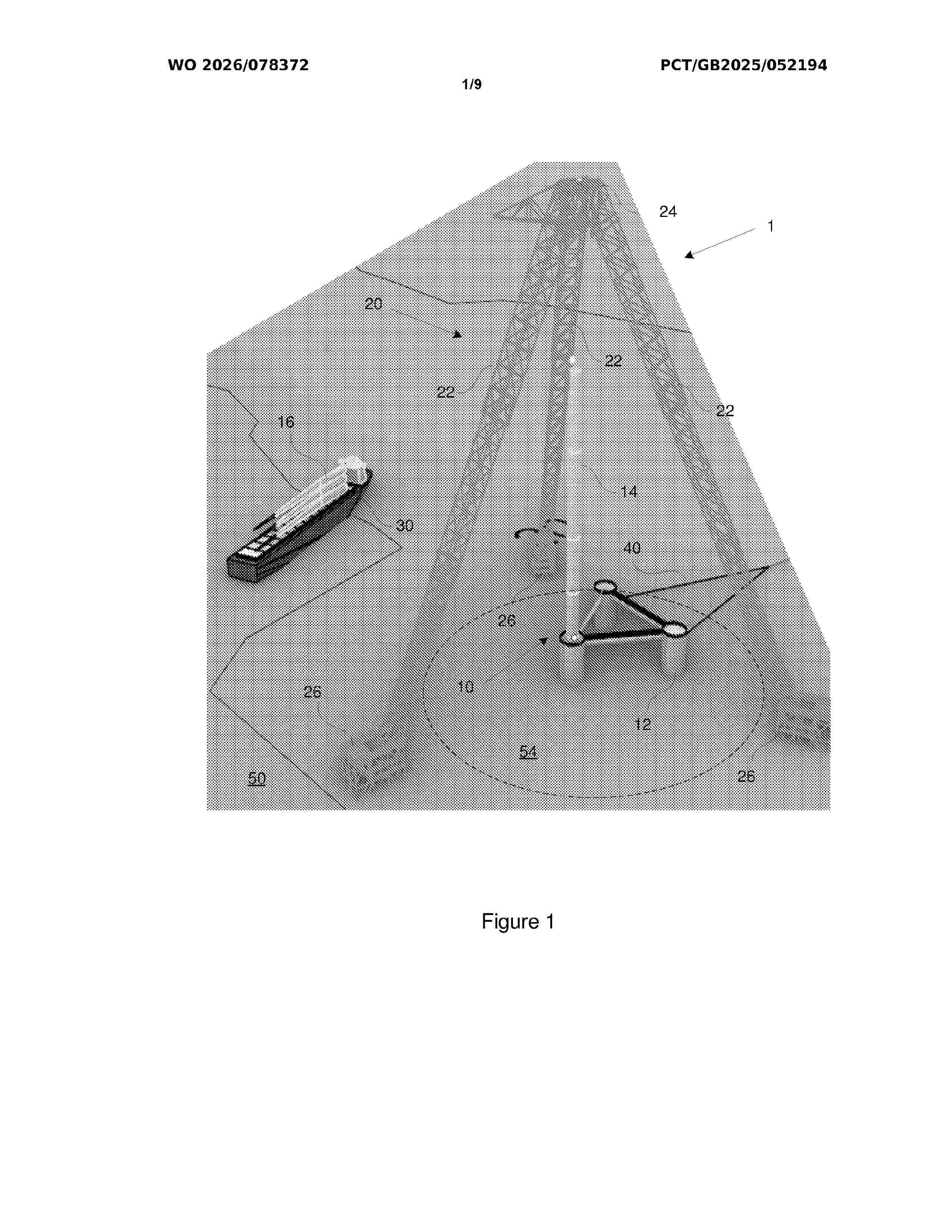
Resumen de: WO2026078372A1
An assembly system (100) for assembling an offshore structure (110), the assembly system comprising: a floating base (112) of the offshore structure (110); a lifting structure (120) configured to perform a landing operation, the landing operation comprising landing one or more components (114) of the offshore structure (110) onto the floating base (112); and a heave reduction system configured to selectively adjust a draft of the floating base (112) during the landing operation. A method (500) of assembling an offshore structure is also disclosed.
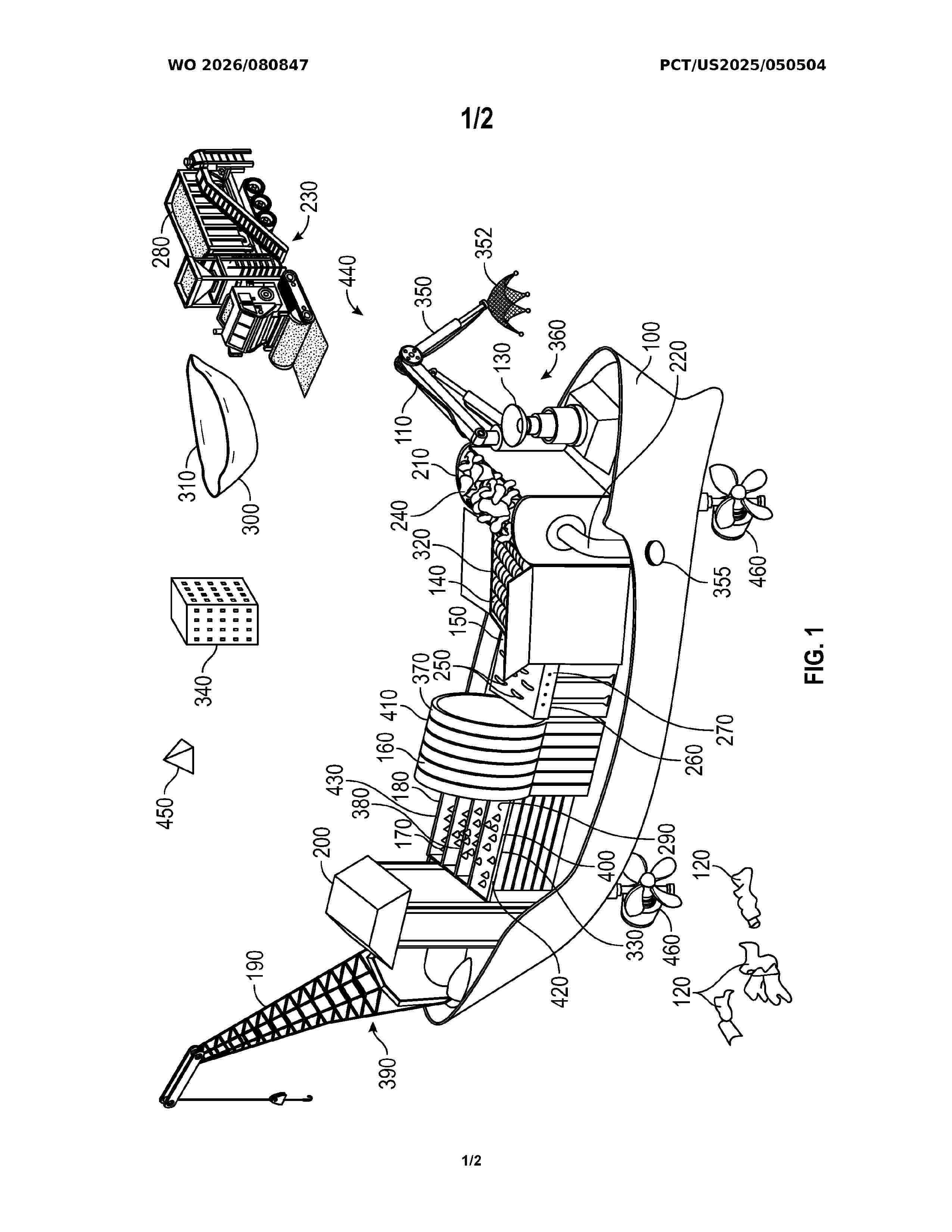
Resumen de: WO2026080847A1
A marine vessel designed for the collection, shredding, and pelletizing of oceanic plastic waste. The vessel uses renewable energy sources such as solar panels and wind turbines to power onboard systems, including Al-enhanced sensors that detect and target high-density areas of plastic debris. Once collected, the plastic is shredded and processed into uniform plastic pellets optimized for use in plastic asphalt production. The vessel also includes storage compartments for the pellets and a crane system for transferring containers filled with pellets to adjacent vessels or shore-based transport. This integrated system addresses inefficiencies in traditional ocean cleanup methods by enabling immediate onboard processing, reducing transportation needs, and repurposing plastic waste into a valuable industrial resource, while significantly minimizing environmental impact through sustainable energy use.
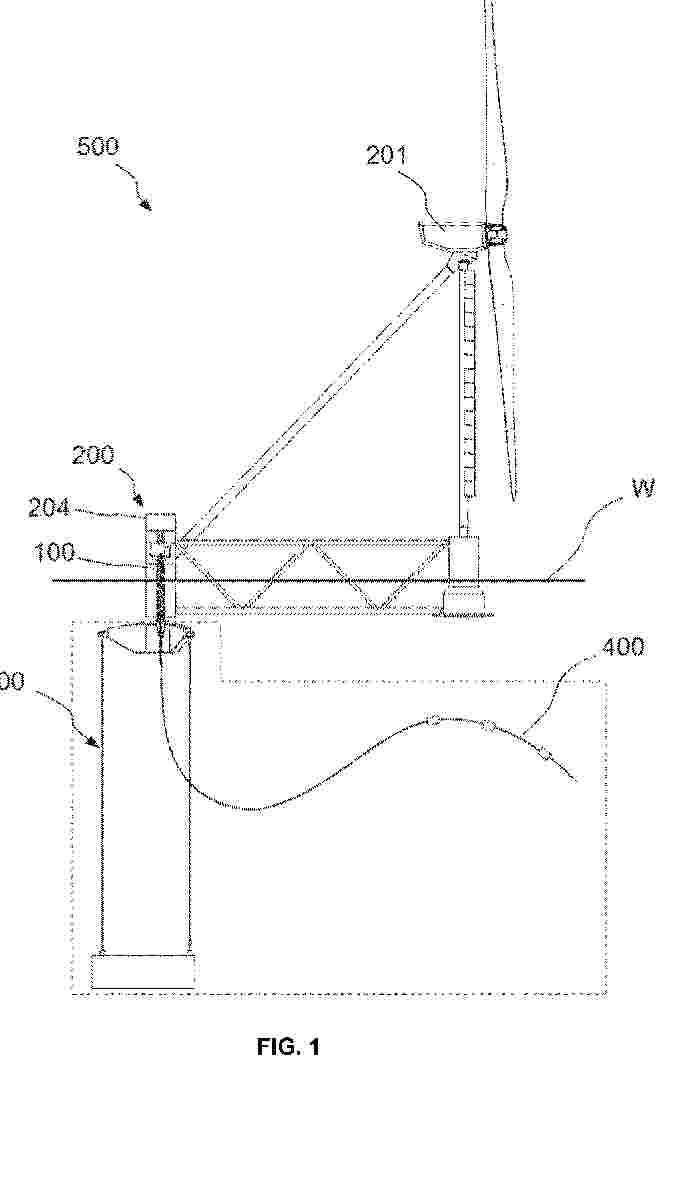
Resumen de: AU2024356626A1
A connecting system (100) for connecting a weathervaning floating offshore support structure (200) of a wind turbine (201) to a pre-laid mooring system (300), the connecting system (100) comprising: - a turret element (1) comprising: a base (2) for being solidly connected to the pre-laid mooring system (300); a support element (3) comprising a switchgear (31) connectable to one or more submarine cables (400) and connectable to receive a power generated by the wind turbine (201); a columnar body (4) extending from the base (2) to the support element (3), and comprising an inner passage (41); and a bearing system (5) configured to rotatably connect the turret element (1) to the weathervaning floating offshore support structure (200); and - a slip-ring connector (6) comprising a first connecting part (61) for receiving the power generated by the wind turbine (201), and a second connecting part (62) cable-connectable to the switchgear (31).
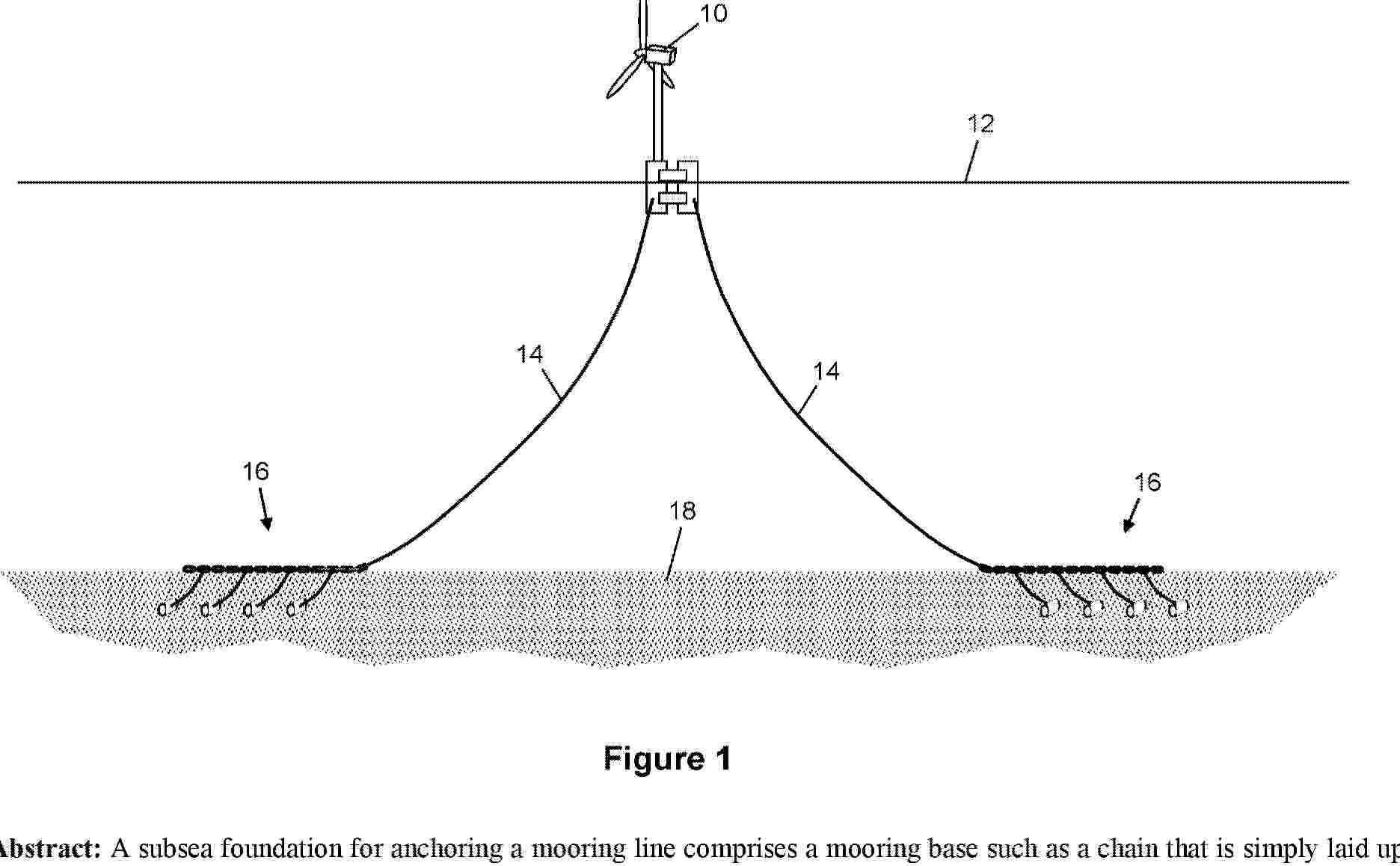
Resumen de: AU2024354596A1
A subsea foundation for anchoring a mooring line comprises a mooring base such as a chain that is simply laid upon the seabed in a straight, curved or looped configuration, hence extending across the seabed substantially parallel to the seabed. The mooring base is then anchored by one or more deadman anchors that are embedded in the seabed soil. For this purpose, one or more links extend through the soil to couple the mooring base to the or each deadman anchor. One or more mooring lines can then be coupled to the mooring base.
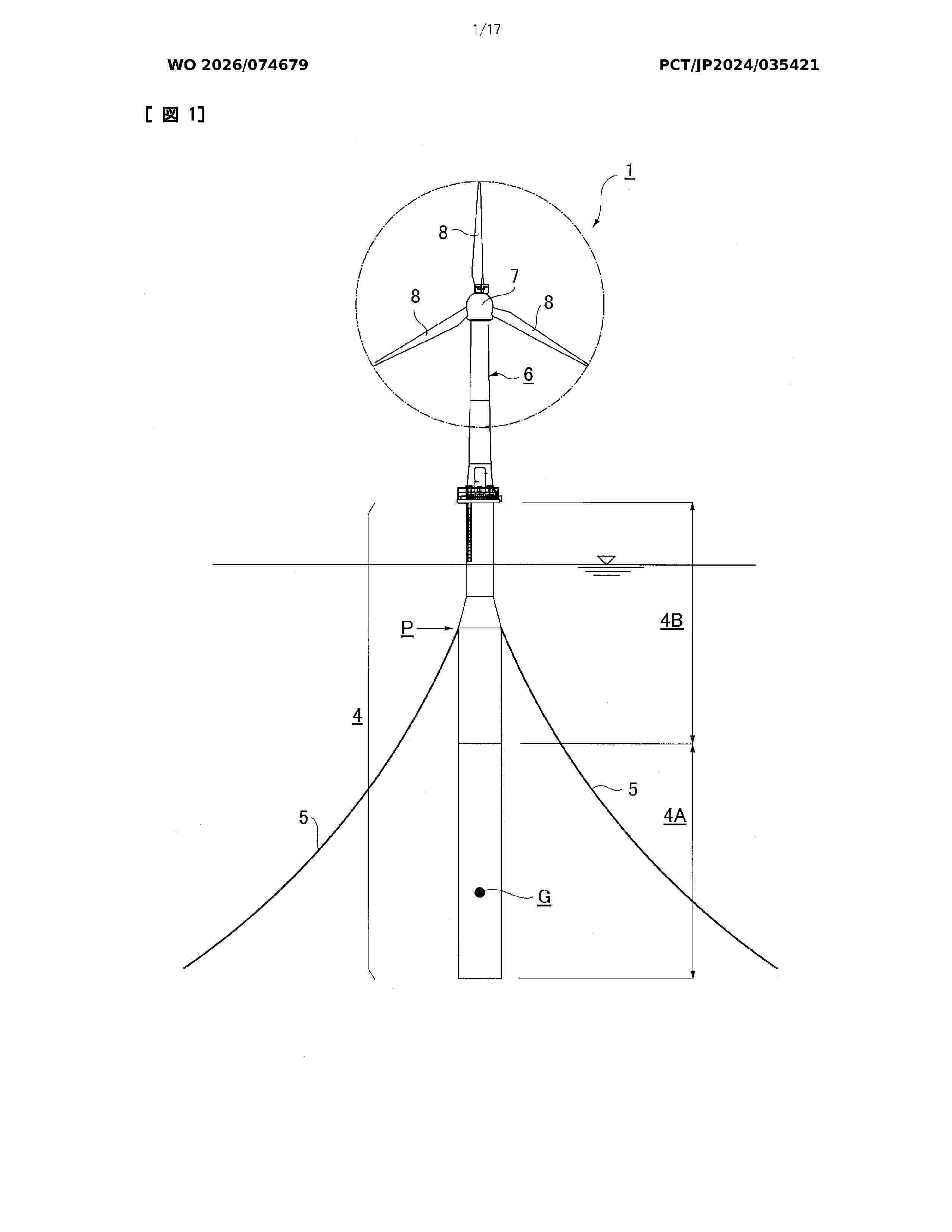
Resumen de: WO2026074679A1
Problem To enable efficient and low-cost construction of a spar-type floating body and to simultaneously solve problems such as thermal cracking and bending cracking of concrete. Solution In a spar-type floating body 4, the lower half side is a steel-concrete composite structure part 4A in which concrete C is cast in a predetermined thickness on the inner surface side of an outer shell steel member 10 covering the outer periphery. In the steel-concrete composite structure part 4A, reinforcing bars placed in the concrete C include polygonal first reinforcing bars 35 and second reinforcing bars 36 disposed alternately in a staggered manner at intervals in the longitudinal direction of the floating body, the first reinforcing bars 35 and the second reinforcing bars 36 being constituted by a large number of joint parts a welded to the outer shell steel member 10 over a predetermined length range and at predetermined intervals in the circumferential direction of the outer shell steel member 10, and chord parts b linearly connecting ends of adjacent joint parts a, a. At the center position of each chord part b of the first reinforcing bars 35 and the second reinforcing bars 36, a predetermined cover to the outer surface of the concrete is ensured.
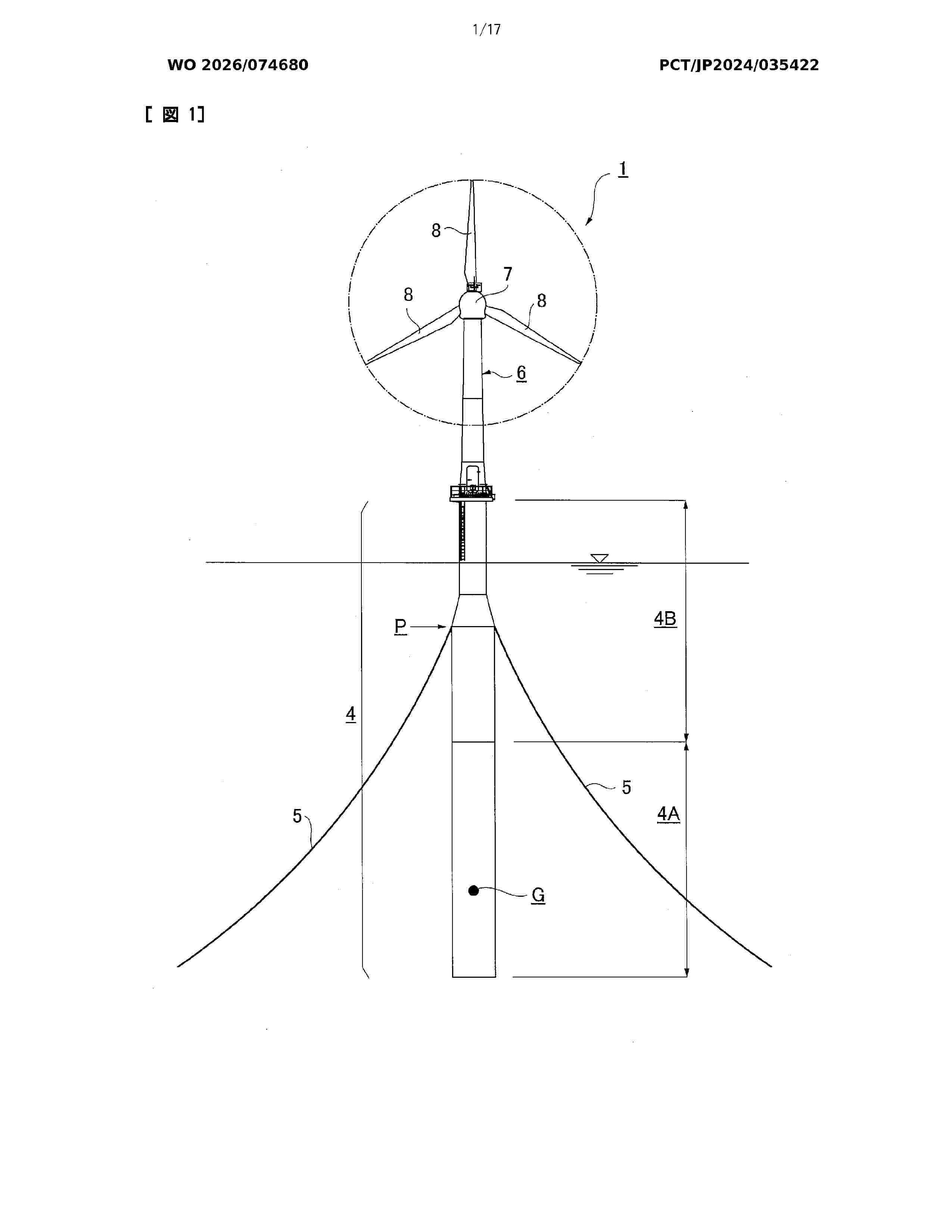
Resumen de: WO2026074680A1
Problem To efficiently construct a spar-type floating body at a low cost, and to simultaneously solve issues such as concrete temperature cracks and bending cracks. Solution A spar-type floating body 4 with the lower half thereof being imparted as a steel-concrete composite structure part 4A in which concrete C is cast to a prescribed thickness on the inner surface of an outer-shell steel member 10 that covers the outer periphery, and the upper half thereof having an outer-shell steel member 12 that covers the outer periphery and being imparted as a steel structure part 4B made entirely of steel members. In the steel-concrete composite structure part 4A, reinforcing bars embedded in the concrete C are formed by arranging assembly reinforcing bars 35 spaced at an interval P along the longitudinal direction of the floating body, each assembly reinforcement 35 comprising: an inner circumferential bar 36A arranged parallel to the outer-shell steel member 10 in a state of maintaining a prescribed cover K with respect to the concrete outer surface; and a zigzag-shaped truss bar 36B arranged so as to alternately connect, over each prescribed length, the inner circumferential bar 36A and the outer-shell steel member 10.
Resumen de: WO2024246109A1
A computer-implemented method for booting a device using a portable boot loader device, wherein the portable boot loader device comprises a boot loader and operating system files, wherein a blockchain comprises a boot loader transaction, wherein the boot loader transaction comprises an output locked to a master public key, and wherein the boot loader transaction comprises a first signature signing the boot loader and a second signature signing the operating system files, and wherein the method comprises: obtaining the boot loader transaction; verifying the first signature using the master public key; verifying the second signature using the master public key; and loading the operating system files using the boot loader.
Resumen de: WO2024246109A1
A computer-implemented method for booting a device using a portable boot loader device, wherein the portable boot loader device comprises a boot loader and operating system files, wherein a blockchain comprises a boot loader transaction, wherein the boot loader transaction comprises an output locked to a master public key, and wherein the boot loader transaction comprises a first signature signing the boot loader and a second signature signing the operating system files, and wherein the method comprises: obtaining the boot loader transaction; verifying the first signature using the master public key; verifying the second signature using the master public key; and loading the operating system files using the boot loader.
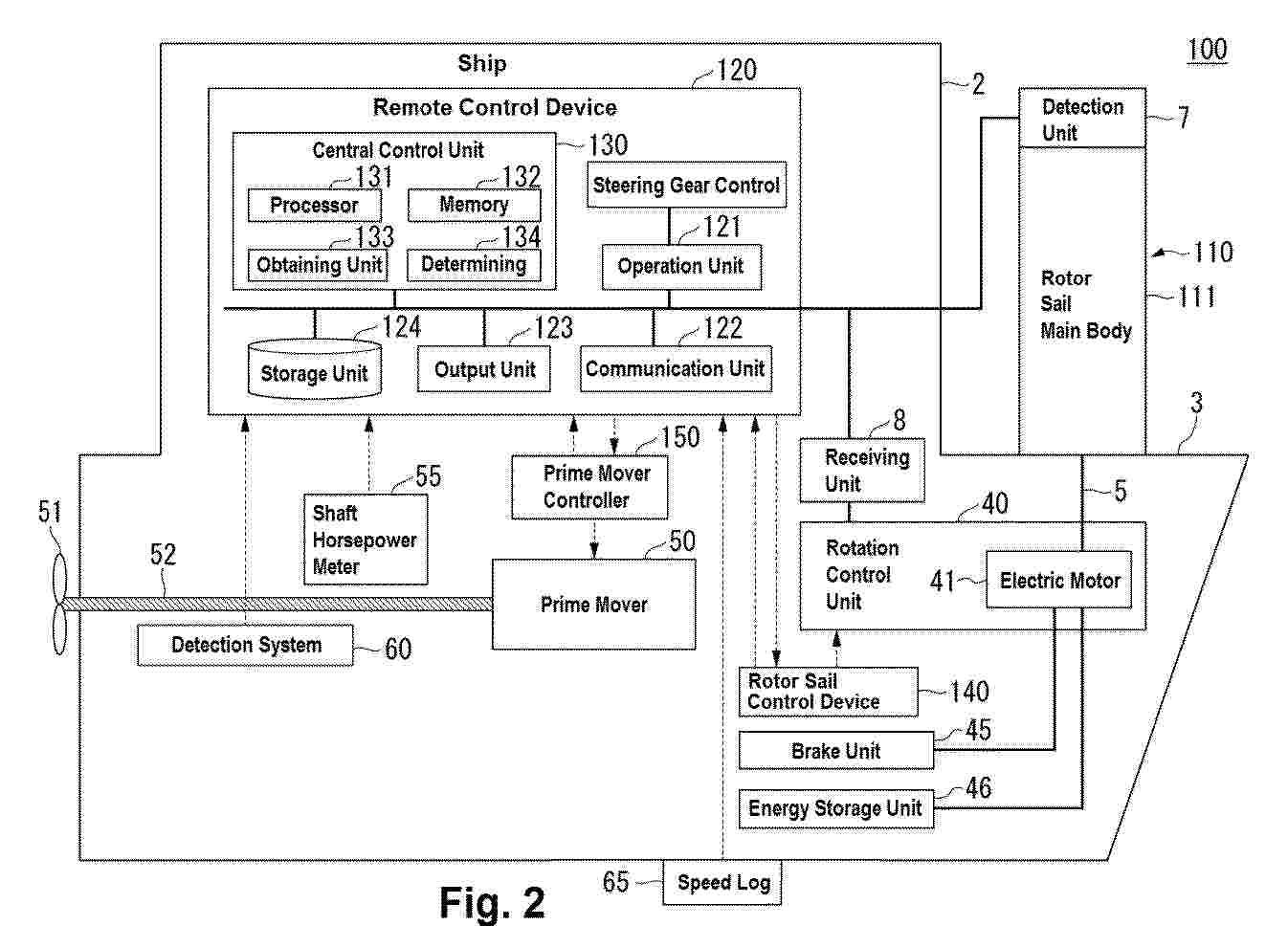
Resumen de: EP4722100A1
A rotor sail system includes: a vertical support post extending in a vertical direction from a hull; a blade connected to a shaft, the blade being rotatable about the shaft, the shaft extending in a predetermined direction with reference to the vertical support post; a detection unit detecting a wind direction and a wind speed in a navigation area of a ship; a receiving unit receiving a thrust command to specify a thrust of the ship; and a rotation control unit capable of controlling a rotational speed of the blade about the shaft. The rotation control unit controls the rotational speed of the blade about the shaft based on the received thrust command and a detection result of the wind direction and the wind speed detected when the thrust command is received.
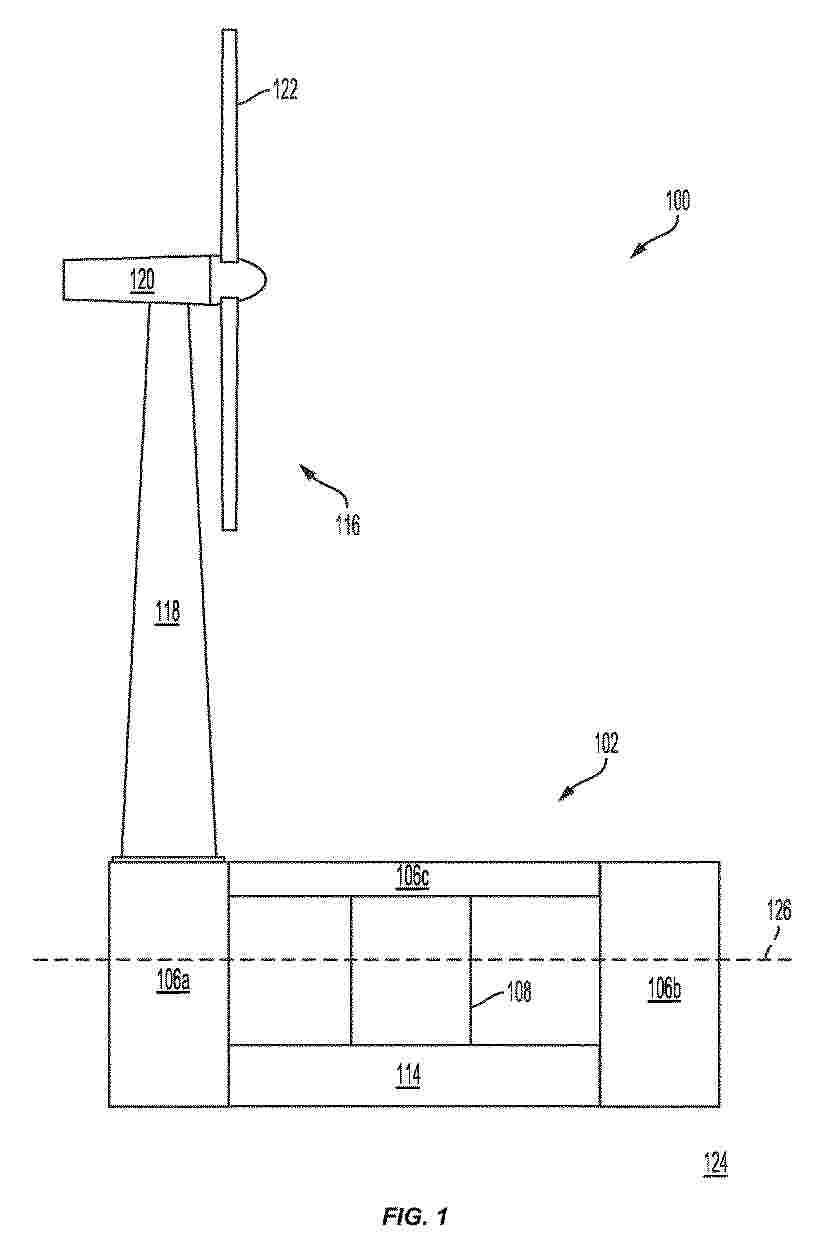
Resumen de: EP4722095A1
A floating platform system can be provided to facilitate mounting of and for supporting a structure on a floating platform. For example, the floating platform system can include the floating platform. The floating platform system can also include a ballast receiving volume inside the floating platform for receiving a ballasting liquid. The floating platform system can further include a mounting surface on the floating platform for mounting a structure. Additionally, the floating platform can include a downwardly-oriented stabbing guide.
Resumen de: WO2024246109A1
A computer-implemented method for booting a device using a portable boot loader device, wherein the portable boot loader device comprises a boot loader and operating system files, wherein a blockchain comprises a boot loader transaction, wherein the boot loader transaction comprises an output locked to a master public key, and wherein the boot loader transaction comprises a first signature signing the boot loader and a second signature signing the operating system files, and wherein the method comprises: obtaining the boot loader transaction; verifying the first signature using the master public key; verifying the second signature using the master public key; and loading the operating system files using the boot loader.
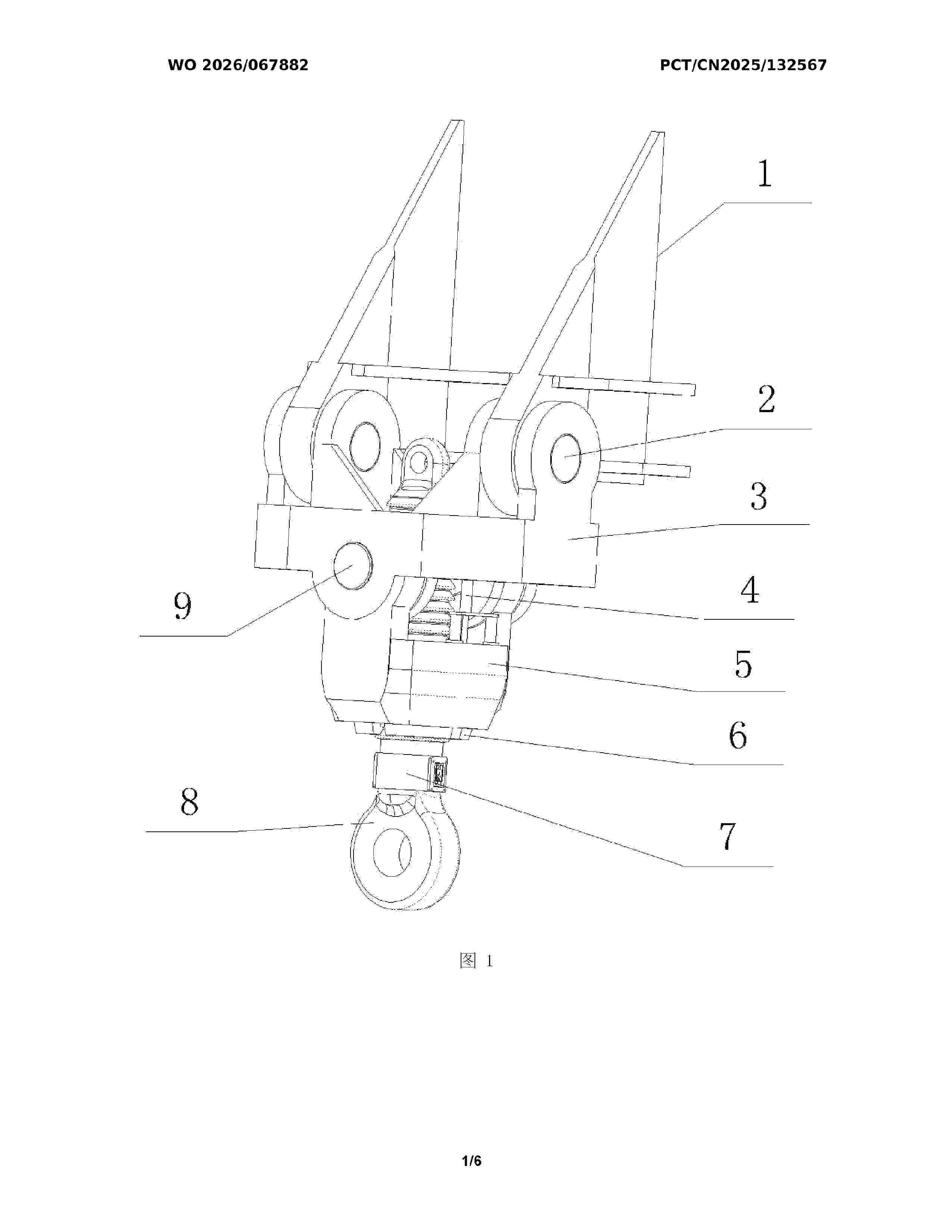
Resumen de: WO2026067882A1
The present invention relates to the technical field of the mooring connection of floating wind power platforms. Disclosed is a high-precision floating body mooring adjustment device based on online tension monitoring. An upper lifting frame is connected to a welding back plate by means of upper rotating shaft pins, and is connected to a lower lifting frame by means of lower rotating shaft pins; a locking mechanism is provided in the lower lifting frame; a toothed column runs through the lower lifting frame and the upper lifting frame, and is locked by means of the locking mechanism; hydraulic cylinders are symmetrically provided on two sides of the lower lifting frame, and by means of the hydraulic cylinders, the entire locking mechanism is moved vertically; and a tension monitoring mechanism is provided at the lower end of the toothed column, and monitors and measures, in real time, the load by means of remote software. The present invention features a high adjustment precision and a short operating cycle, has functions including reliable connection, length adjustment of mooring lines, self-locking and self-tightening, reverse release and load measurement, can adjust the length of mooring lines with high accuracy, simplifies the installation process of reconnection and tensioning of mooring lines of a tension-leg wind power platform, and reduces the mooring and installation costs of the tension-leg wind power platform.
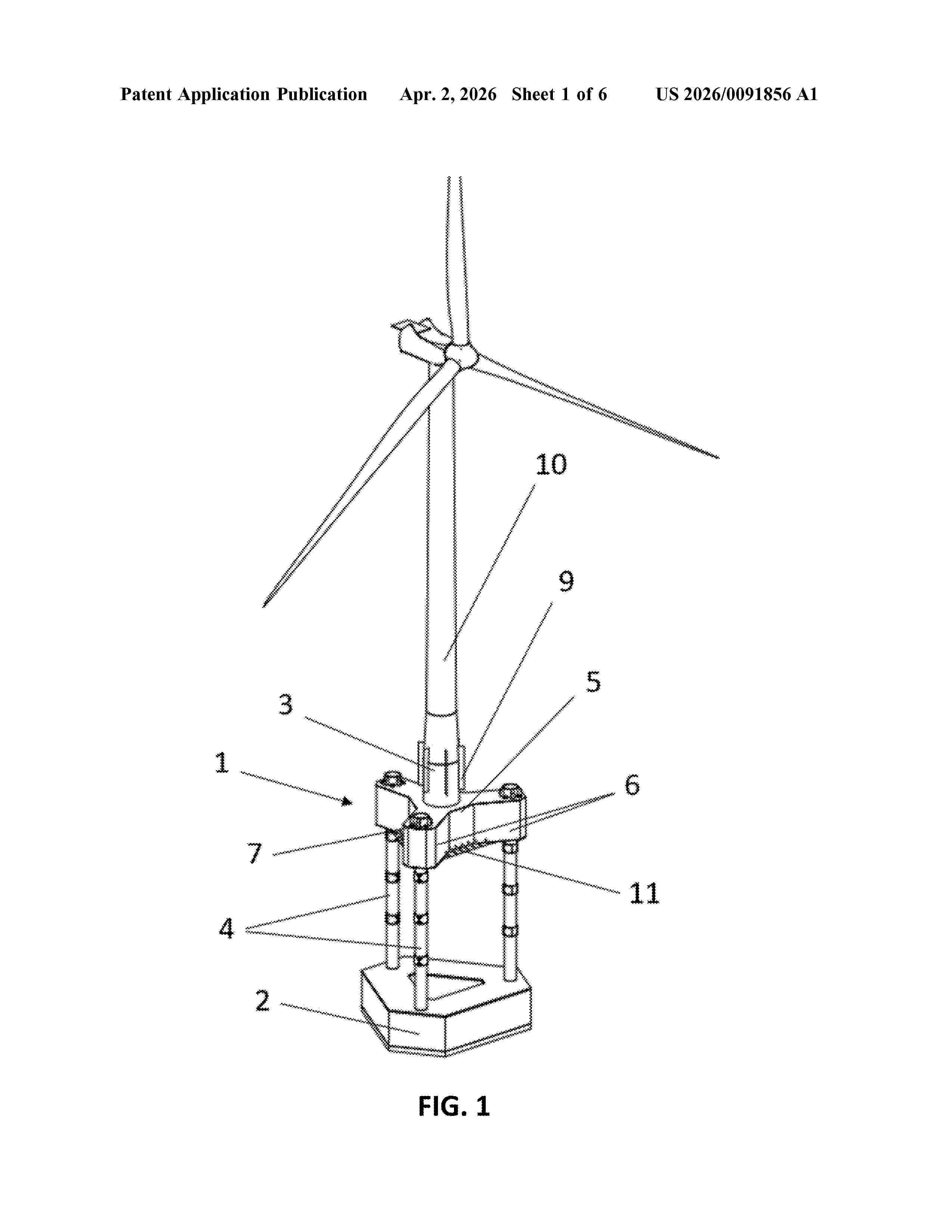
Resumen de: US20260091856A1
The present invention relates to a device for supporting an offshore wind turbine tower. The device comprises a first body (1), a support body (3) attached to the first body (1), a second body (2) and a plurality of legs (4) attached to the second body (2). The support body (3) has a cylindrical interior and is configured to provide support for and connection of a wind turbine tower (10). The first body (1) comprises a central portion (5) connected to the support body (3) and a plurality of hollow arms (6), connected with the central portion (5). Each hollow arm (6) comprises a through-hole (7) configured to allow a leg (4) to pass through the through-hole. The first body (1) has a volume and a weight configured to provide, when empty, a buoyancy of at least 20% of the weight of the entire device, the weight of the first body (1) being less than 8% of the weight of the entire device. The legs (4) and/or the first body (1) have a locking system configured to lock the relative position between the legs and the first body.
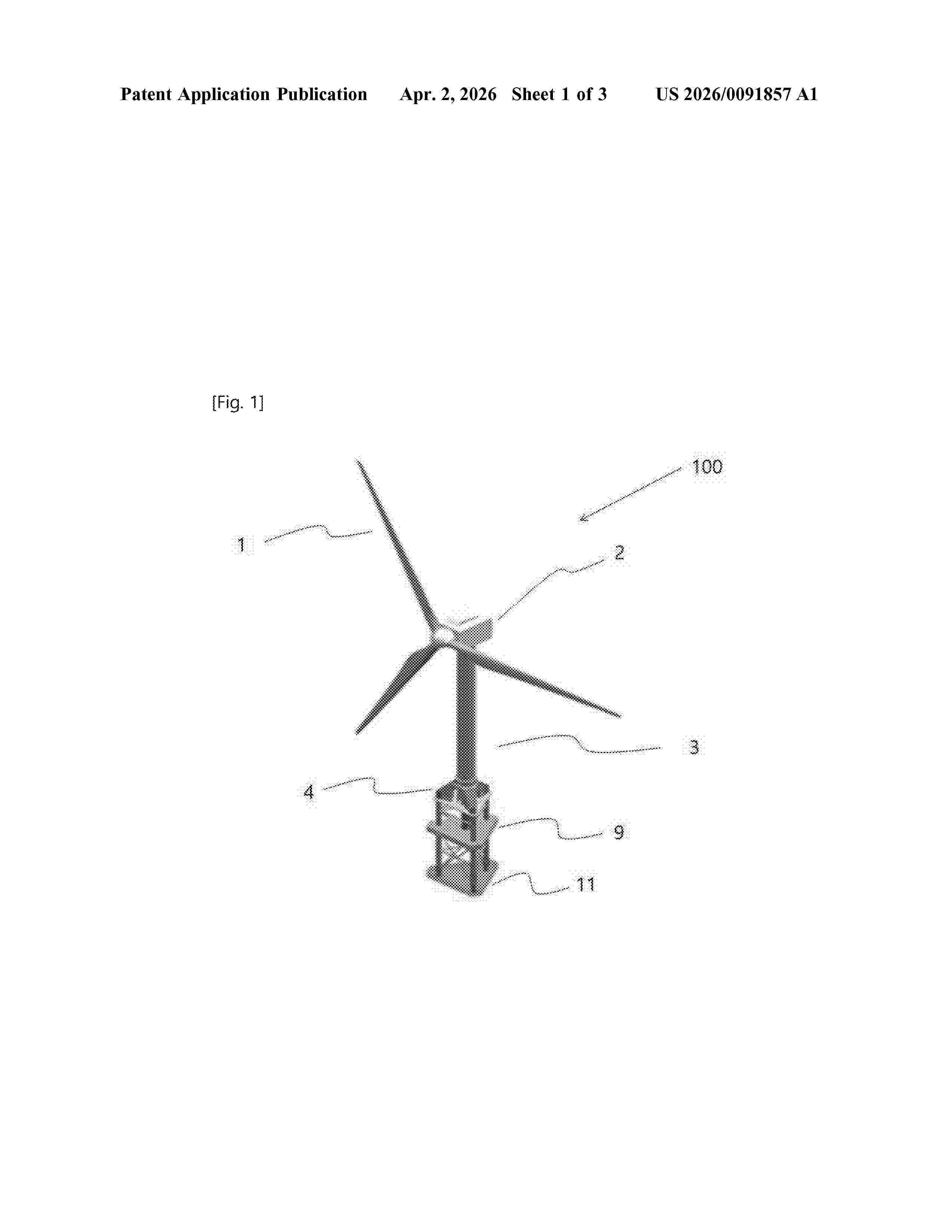
Resumen de: US20260091857A1
A tower-integrated offshore wind power floating body includes a tower formed under a power generation unit, transition pieces (TPs) spaced apart from a lower circumference of the tower at regular intervals, a seating part formed under the tower and the TP to support lower portions of the tower and the TP, a reinforcement column having the same axis as a vertical central axis of the tower and formed under the seating part, a buoyancy part formed under the reinforcement column, a ballast part formed under the buoyancy part such that the ballast part is spaced a length from the buoyancy part, a brace formed between the seating part and the buoyancy part, a brace formed between the buoyancy part and the ballast part, and main columns arranged in a vertical direction in the TP, the seating part, the buoyancy part, and the ballast part, and the main columns.
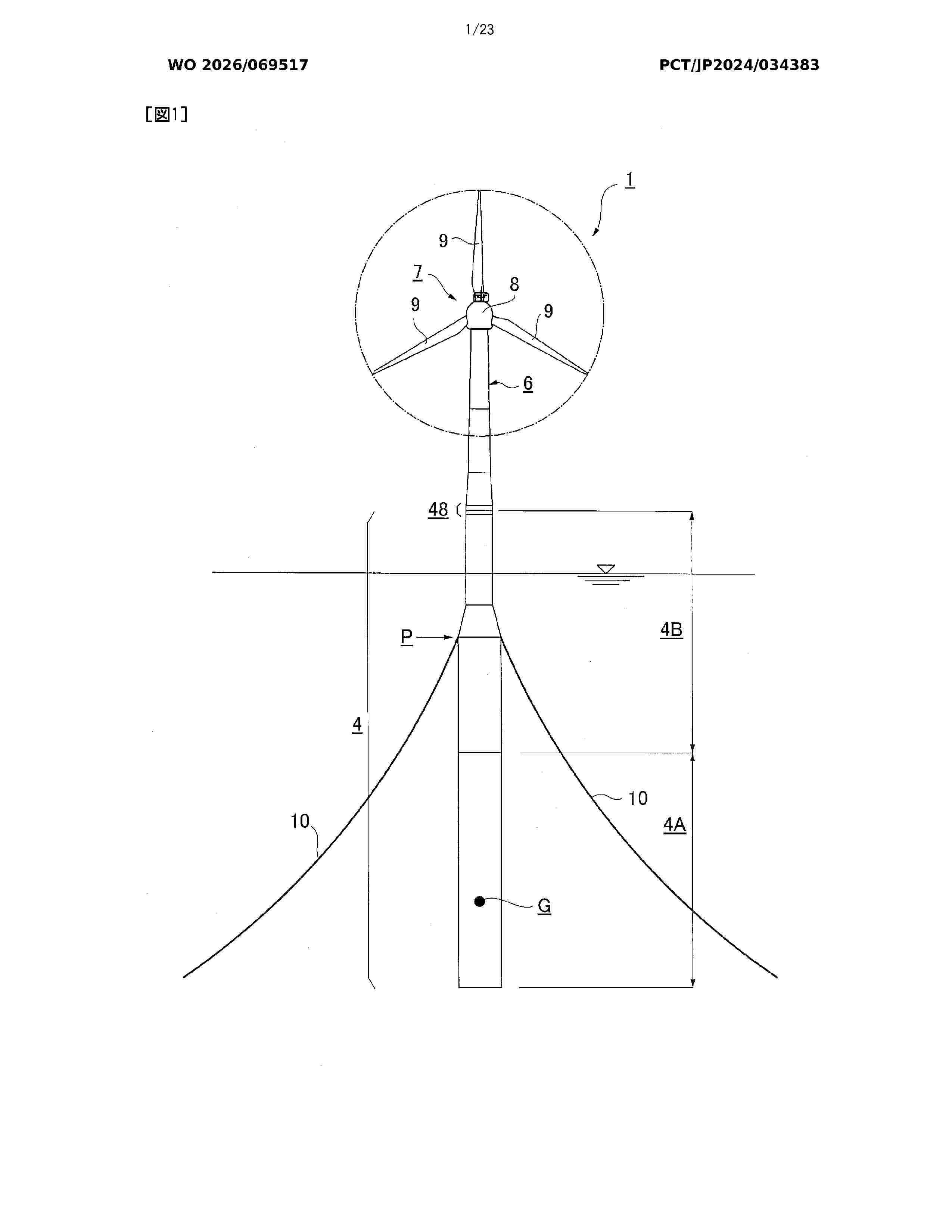
Resumen de: WO2026069517A1
Problem To provide a connection device with which it is possible to stably and efficiently connect an upper structure to a floating body. Solution The connection device 48 is composed of: a floating body-side connection device 49 provided at the upper end of a floating body 4; and a tower-side connection device 50 provided at the lower end of a tower 6. The floating body-side connection device 49 has at least two introduction tubes 54, 55 embedded on the upper surface side of a bottom plate 51, and the tower-side connection device 50 has a plurality of introduction pins 59, 60 provided on the lower surface side of a top plate 56 in correspondence to the introduction tubes 54, 55. The introduction tubes 54, 55 are constituted by engagement tube parts 54A, 55B in which elliptical through-holes are formed, and funnel parts 54B, 55B, and the introduction pins 59, 60 have elliptical cross sections so as to correspond to the elliptical through-holes. A connection flange 53 of the floating body-side connection device 49 and a connection flange 58 of the tower-side connection device 50 are fastened by a bolt and nut member 62 while the corresponding introduction tubes 54, 55 and the introduction pins 59, 60 are engaged with each other.
Nº publicación: WO2026068415A1 02/04/2026
Solicitante:
AKER SOLUTIONS AS [NO]
AKER SOLUTIONS AS
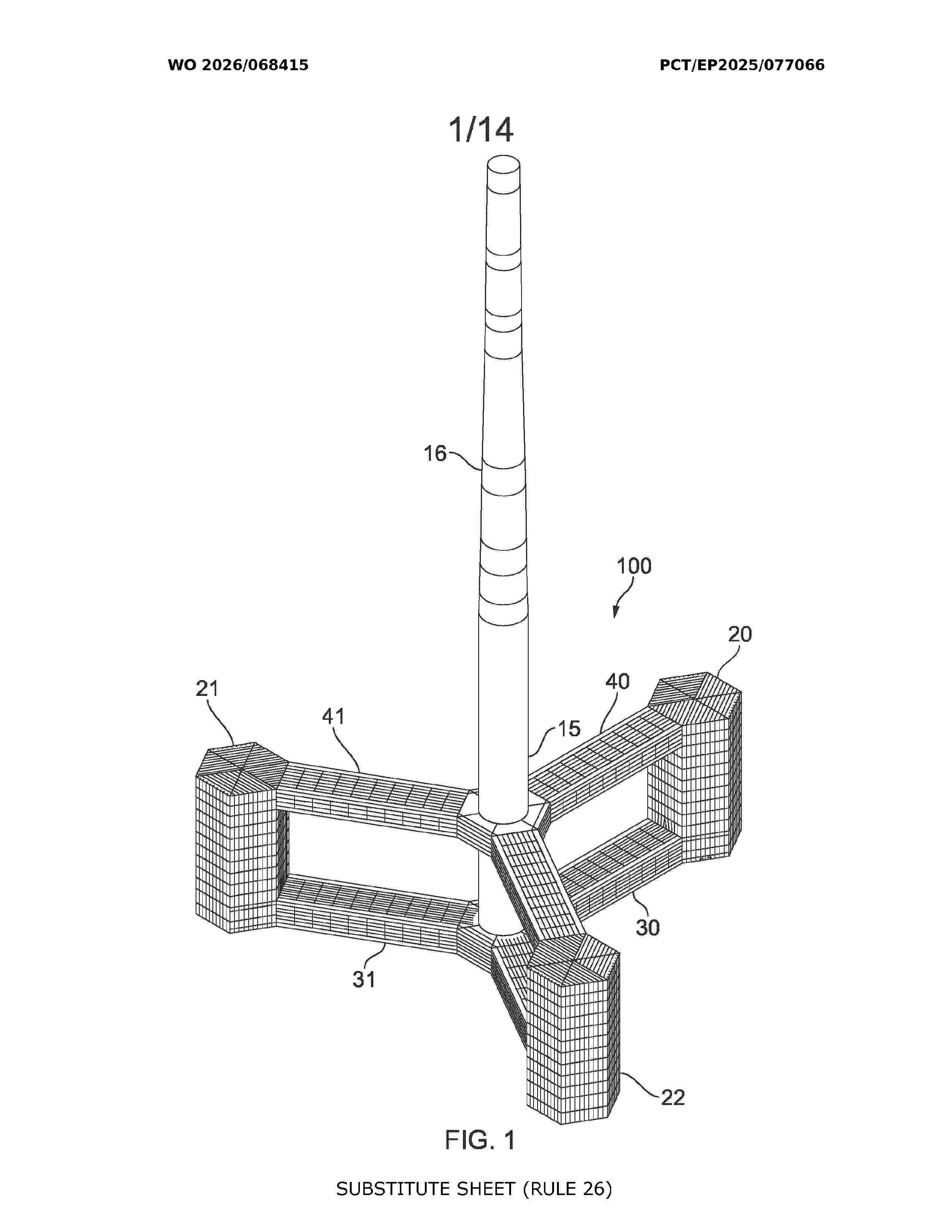
Resumen de: WO2026068415A1
A method of constructing a floatable foundation (100) for a wind turbine generator, the method comprises: assembling a hull (101) for the floatable foundation (100) at a shoreside yard (102), the hull (101) comprising three interconnected columns (20,21,22), each column (20,21,22) having a ballast tank (140-142) arranged at least partly therein and a ballast water filling interface (143-145) fluidly connected to the respective ballast tank (140-142); moving the hull (101) from the shoreside yard (102) to a floating position adjacent or spaced from the shoreside yard (102); and with the hull (101) in the floating position, filling each of the ballast tanks (140-142).
 BOPI
BOPI
 Sede Electrónica
Sede Electrónica