Si deseas distinguir tus productos, servicios o ambos de los de otra empresa, es posible que necesites una marca o nombre comercial. Descubre qué son, en qué consiste su procedimiento de registro y qué implica.

Información sobre los plazos de presentación de solicitudes de transformación de marcas de la Unión Europea en marca nacional española. Más información


Si tienes un nuevo dispositivo, producto o procedimiento que resuelva un problema técnico o tenga una ventaja práctica, existen distintas formas de protegerlo en España y en otros países. Descubre cómo hacerlo.

¿Tu innovación reside en la estética, la ornamentación o la apariencia de tu producto? Protégela mediante un diseño industrial. Descubre qué derechos confiere el registro y cómo realizar la tramitación.

Las indicaciones geográficas protegen el nombre de un producto originario de una zona geográfica, a la cual le debe una determinada calidad, reputación u otra característica. Descubre qué son, en qué consiste su procedimiento de registro y qué beneficios conceden.

Las patentes publicadas en todo el mundo son una valiosa fuente de información científica, técnica y comercial.

Si eres emprendedor/a o una empresa y quieres potenciar y mejorar la rentabilidad de tu negocio protegiendo de forma adecuada los activos intangibles de tu organización, en este espacio encontrarás lo necesario.



 51
resultados
51
resultados
 Última actualización
08/05/2026 [07:07:00]
Última actualización
08/05/2026 [07:07:00]



Resumen de: EP4738307A1
A traffic flow simulation method includes acquiring road map data including information regarding each of one or more lanes included in a road, acquiring traffic flow data corresponding to the road, acquiring road infrastructure data corresponding to the road, acquiring vehicle terminal data from at least one vehicle located on the road, and generating simulation information regarding the road, based on at least one of the road map data, the road infrastructure data, traffic volume information by vehicle type included in the traffic flow data, and the vehicle terminal data.

Resumen de: WO2025007080A1
The technology disclosed comprises systems and methods for the training and validation for an end-to-end neural-network learning model configured for autonomous driving. The end-to-end neural-network learning model is trained using human-operated driving demonstration data to curate training data examples of driving tasks and driving routes, as well as curation of particularly difficult driving tasks. The determination of difficulty of driving tasks uses a combination of entropy measurements in training, evaluation of model performance, and manual labeling. The conditional imitation learning model can be configured as a memory-augmented transformer model that leverages a memory-cached frame buffer to access previous states in a driving trajectory. The disclosed technology can be applied to passenger vehicles or autonomous robots for delivery tasks.
Resumen de: EP4737948A1
A movement control device (1) controls the movement of a vehicle (V) on the basis of information relating to the current position of the vehicle (V). Specifically, the movement control device (1) comprises: an own-position estimating unit that estimates the current position of the vehicle (V) on the basis of GNSS information; an environment information acquiring unit that acquires environment information around the vehicle (V); and a movement information acquiring unit that acquires movement information of the vehicle (V). The own-position estimating unit estimates the current position of the vehicle (V) on the basis of the environment information when the GNSS information cannot be acquired. The own-position estimating unit estimates the current position of the vehicle (V) on the basis of the movement information when the GNSS information and the environment information cannot be acquired.
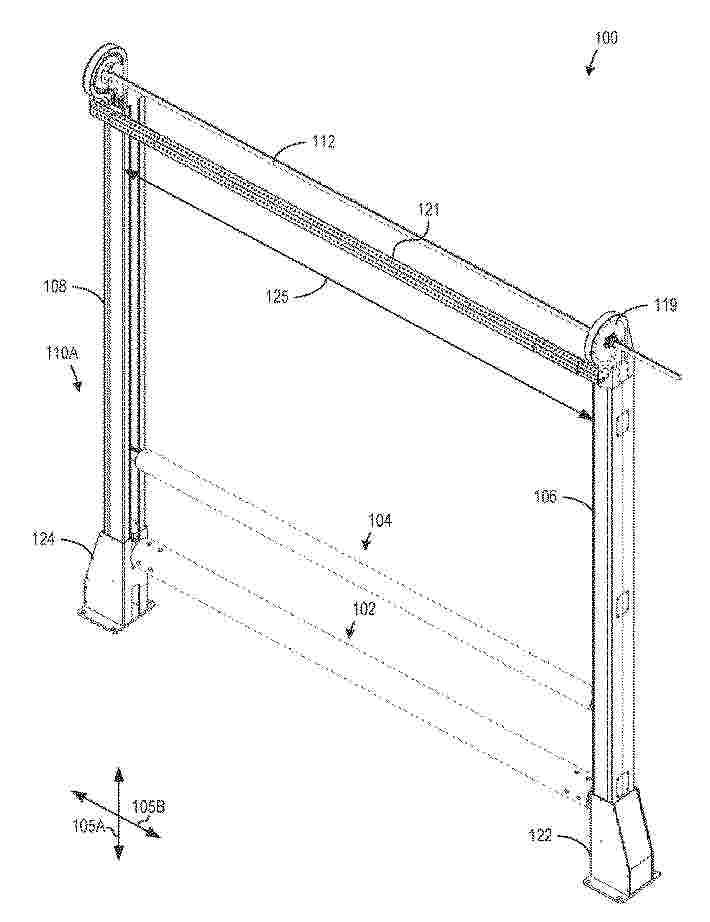
Resumen de: WO2025007131A1
Example impactable gate systems disclosed herein include a track to be coupled to a base post, a drive strip slidable along the track, a rail including a tube, the rail to move with the drive strip relative to the track between an opened position and a closed position, and a bracket to be disposed within the track, the bracket to couple the rail to the drive strip, the bracket to be disposed within the base post when the rail is in the closed position.
Resumen de: EP4737065A1
0001 A control system includes a state recognition unit, an emotion determination unit, and an action determination unit, in which an electronic apparatus is detachably provided on a movement unit having a wheel for autonomous traveling, the electronic apparatus includes one or plural sensors that collect information for controlling rotation of the wheel, and device operations include setting first action content of leading a user by controlling the wheel.
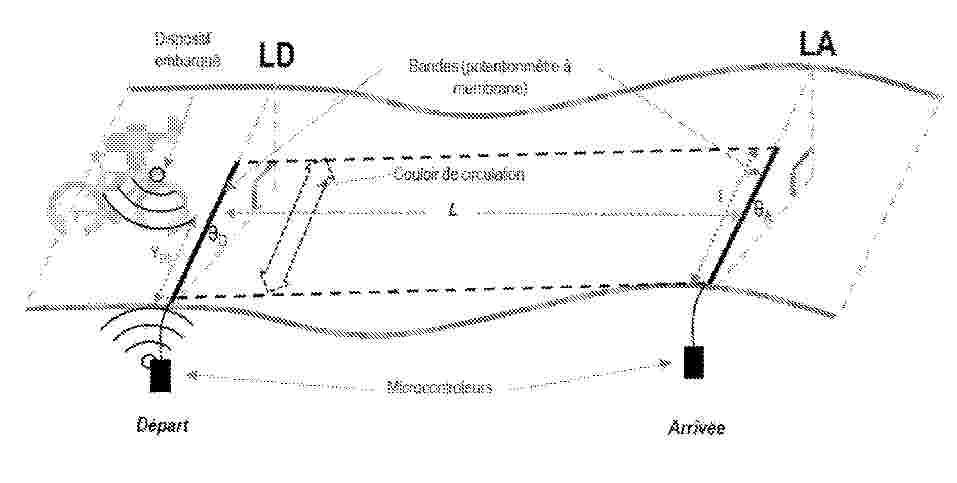
Resumen de: WO2025003215A1
The invention relates to a method for determining at least one friction parameter of a cyclist under real movement conditions, on a banking section of track or road, extending longitudinally from a start line (LD) to a finish line (LA) over a length (L), each of the start line (LD) and the finish line (LA) extending transversely across a width (l). The method, based on an equation derived from the principle of conservation of energy, comprises a step of measuring a first transverse position (P1) at which the cyclist crosses the start line (LD) and a second transverse position (P2) at which the cyclist crosses the finish line (LA), each of the first and second transverse positions (P1, P2) being determined across the width (l) with an accuracy of +/-5 cm. The invention also relates to devices for measuring a transverse position at which the cyclist crosses.
Resumen de: EP4738193A1
0001 The present invention is directed to a computer implemented system (100) and method for generating data sets (3) representing traffic scenarios to be used for training and/or testing automated driving (AD) functions. The system (100) comprises one or more processors and a memory that stores one or more programs that are configured to be executed by the one or more processors. Said programs comprise at least one first Large Language Model (LLM) and/or Vision Language Model (VLM) being trained at least on formatted text descriptions of traffic scenarios and on natural language to perform a task given a prompt. 0002 Besides, said programs include instructions to • Transform an initial data set (1) into a formatted text description of a corresponding real traffic scenario, • Construct a first prompt (11) as input for the first LLM or VLM acting as modifier agent (10), wherein the first prompt (11) includes the formatted text description of said real traffic scenario and a user specification of a wanted modification of said real traffic scenario, • Apply the first prompt to the modifier agent (10) and obtain a modified formatted text description of a modified traffic scenario as output ((12), and • Transform the modified formatted text description into a corresponding data set (3) representing the modified traffic scenario.
Resumen de: EP4737860A1
Aircraft systems and methods are provided for assisting operation of an aircraft utilizing a passing corridor to overtake another aircraft. One method involves providing, on a display device, a graphical user interface (GUI) display including a graphical representation of a planned route of travel and a second graphical representation of the vehicle operating in the passing corridor adjacent to the route corridor corresponding to the planned route of travel, identifying a merge location within the passing corridor for returning to the planned route of travel within the route corridor based on the relative speed difference and respective location associated with another vehicle operating in the route corridor, and providing a graphical indication of the merge location within the passing corridor on the GUI display on the display device.
Resumen de: EP4738213A1
L'invention concerne Procédé de dépannage d'un véhicule (100) d'un usager, l'usager possédant un dispositif de communication (31), le procédé comprenant les étapes suivantes : A. demande de dépannage par l'usager au moyen de son dispositif de communication, la demande de dépannage identifiant le type du véhicule et éventuellement un type de panne suspectée ; B. localisation de l'usager notamment au moyen du dispositif de communication, ladite localisation fournissant une position estimée du véhicule de l'usager ; D. identification d'un dépanneur (111, 112, 113, 115) susceptible d'intervenir pour dépanner le véhicule de l'usager ; E.Envoi d'une demande d'intervention au dépanneur identifié (112).
Resumen de: EP4738305A1
Embodiments of the present disclosure relate to methods for autonomous navigation. A computer program, a computer-readable data carrier and an apparatus are also disclosed. The method for autonomous navigation comprising: obtaining, from a multimodal predictor, one or more candidate trajectories for traffic participants; obtaining, using reachability analysis, respective candidate navigation corridors for each candidate trajectory; obtaining, for each candidate trajectory, a cumulated area of each of the respective candidate navigation corridors; classifying, for each candidate trajectory, a candidate navigation corridor having a greatest cumulated area as relevant corridor, thereby obtaining a class of relevant corridors; obtaining an overlap score between each pair of the relevant corridors in the class of relevant corridors; determining that at least one obtained overlap score, corresponding to at least one pair of the relevant corridors, exceeds a predetermined threshold; replacing, in the class of relevant corridors, each pair of the at least one pair of the relevant corridors with an intersection of said each pair, thereby obtaining an updated class of relevant corridors; and using, by a branch model predictive control, BMPC, the updated class of relevant corridors for generating a predicted trajectory and control commands to an autonomous system.
Resumen de: EP4738306A1
An electronic control device includes a vehicle information acquisition unit that acquires information about a vehicle and stores the information as vehicle-unit data, a vehicle-unit data collection task management unit that manages a vehicle unit data collection task in which a collection condition indicating a trigger for collection of vehicle-unit data to be a collection target and a collection goal indicating a goal relating to the collection are set, a data collection task condition monitoring unit that generates a data collection event based on the collection condition set in the vehicle-unit data collection task and designates a content of the collected data, and a collection target data extraction unit that receives the data collection event from the data collection task condition monitoring unit, extracts the vehicle-unit data to be a collection target, and stores the extracted vehicle-unit data as the collected data. The content of the collected data stored by the collection target data extraction unit is changed based on the collection result of the collected data for the collection goal designated in the vehicle-unit data collection task.
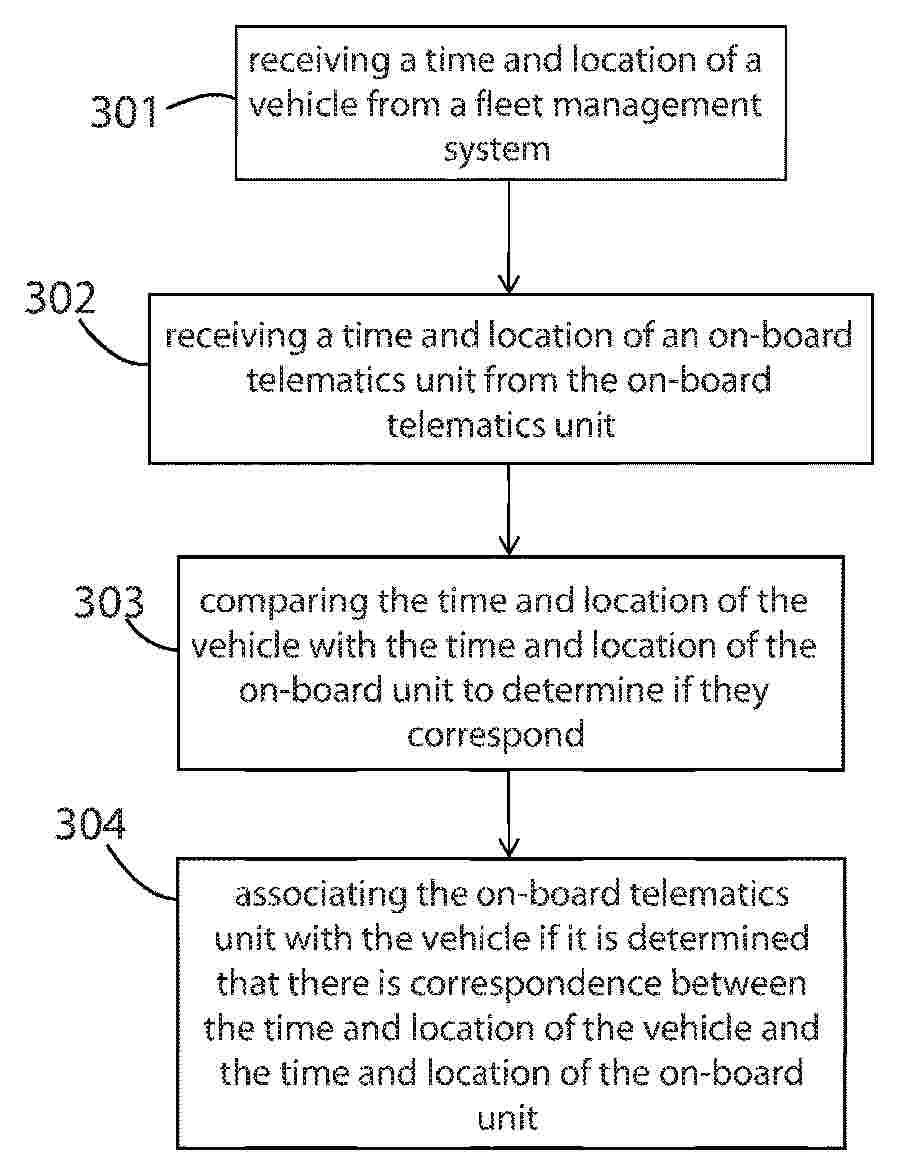
Resumen de: GB2559159A
Method of associating an on-board telematics unit with a vehicle comprises receiving time and location data for a vehicle from a fleet management system and from an on-board telematics unit, and associating the on-board telematics unit with the vehicle if the time and location data from the fleet management system and on-board telematics unit correspond. The process of associating an on-board unit with a vehicle is thereby fully automated. Also claimed is a method of creating a geofence for a first location comprising: receiving from a fleet management system a time that first and second vehicles were at the first location; receiving from on-board telematics units a time that the vehicles were at a second location; and creating a geofence for the first location including the second location if the vehicles were at the second location for a predetermined time. Also claimed is a method for maintaining a vehicle stock report comprising: receiving a vehicle assignment from a fleet management system; determining that the vehicle should be within a geofence a predetermined time after assignment; receiving a time and location from a vehicle on-board unit; determining if the received location is within the geofence; updating the stock report based on the determination.
Resumen de: WO2026089516A1
The present invention relates to a spreader, comprising: a storage unit including a storage body defining a storage space for accommodating a material to be spread, and a storage discharge hole penetrating a lower portion of the storage body; a spreading unit that spreads the material discharged from the storage discharge hole in a forward direction; a carriage unit connected to the storage unit or the spreading unit and supporting the storage unit or the spreading unit; and a moving unit connected to the carriage unit to move the carriage unit, wherein the spreading unit includes: a rotating unit that rotates the material to be spread; a cover unit covering upper and rear portions of the rotating unit and including a cover hole communicating with the storage discharge hole; a base coupled to the cover unit and accommodating the rotating unit; a motor unit, a portion of which penetrates the base from below to be connected to the rotating unit, configured to drive the rotating unit; and an adjustment unit slidably coupled to the cover unit to adjust a region through which the material to be spread is discharged to the exterior of the spreading unit.
Resumen de: WO2026087825A1
A monitoring system and a method for are disclosed. The solution comprises monitoring (300) by a first sensor a first surface area utilising an electromagnetic signal; monitoring (302) by a second sensor a second surface area utilising an electromagnetic signal, where the second surface area is within a predetermined distance from the first surface area; obtaining (304), based on monitoring of the first sensor, information on properties of material accumulated on the first surface area; obtaining (306), based on monitoring of the second sensor, information on properties of material accumulated on the second surface area and determining (308) condition of the first surface area based on the obtained information.
Resumen de: WO2026086453A1
A state prediction method and apparatus for traffic lights, a device, and a medium. The method comprises: receiving collected data of traffic lights sent by a vehicle, the collected data comprising collection times and signal light states of the traffic lights at the collection times; determining a light state time sequence of each traffic light on the basis of the signal light states of the traffic lights at the collection times; and generating a state prediction result of the traffic light within a specified time period on the basis of the light state time sequence of each traffic light and change rule information.
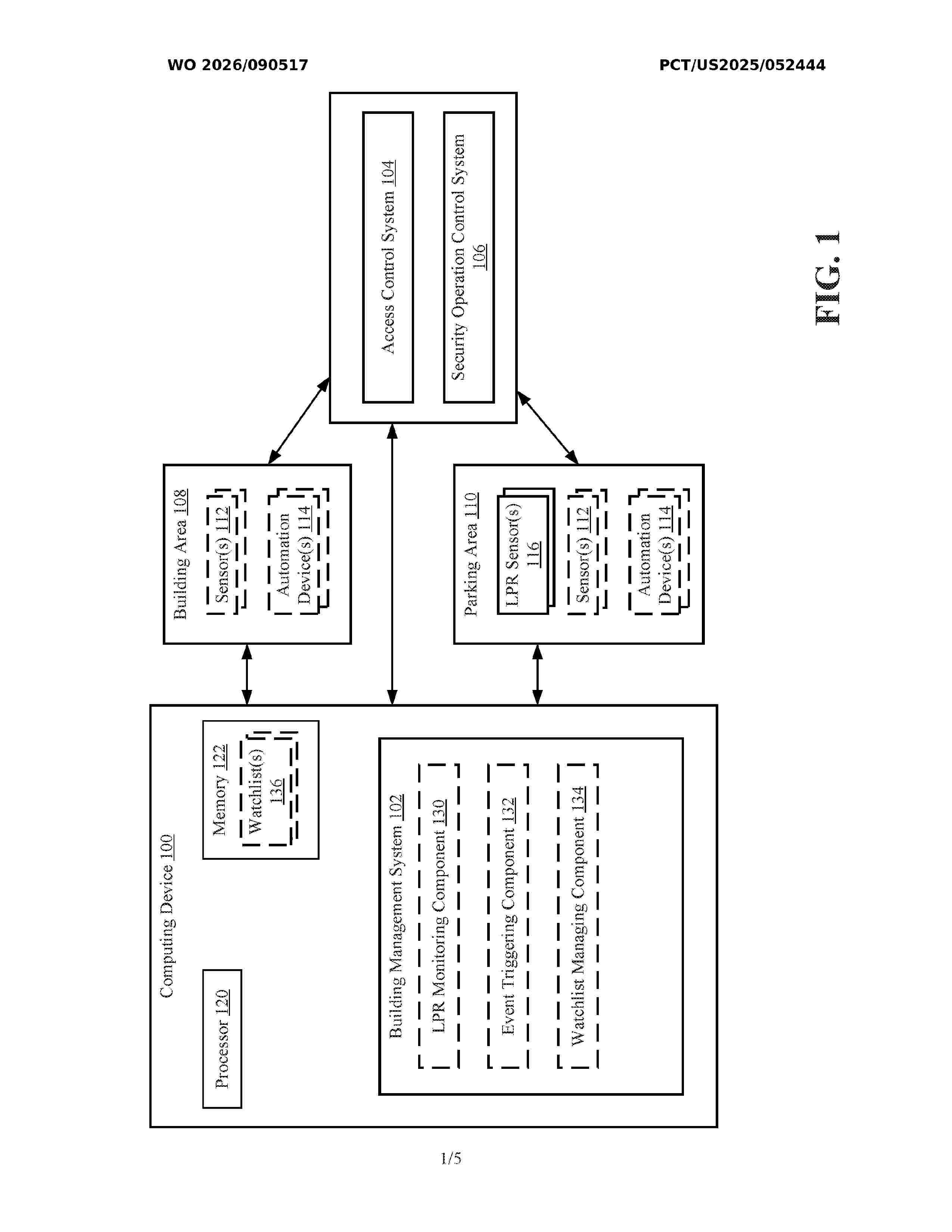
Resumen de: WO2026090517A1
Example implementations include aspects for triggering events in a building management system. An indication of a read, by a license plate recognition (LPR) sensor, of a license plate of a vehicle at an endpoint of a parking area can be received from the LPR sensor. An event can be triggered in the building management system based on the indication of the read.
Resumen de: WO2026086662A1
A method and device for determining a trajectory confidence level, and a sensing system. The method for determining a trajectory confidence level comprises: on the basis of first trajectory information of a target object and a first environment, acquiring a first relationship between the target object and the first environment; and on the basis of the first relationship, determining a spatial domain confidence level of the first trajectory information. By means of introducing a spatial interaction relationship between a target object and a surrounding environment, a spatial domain confidence level of trajectory information of the target object is determined.
Resumen de: WO2026089573A1
The present invention relates to a method for transporting pharmaceuticals at an appropriate temperature by predicting temperature control values through artificial intelligence–based analysis of environmental data and meteorological data on a cold chain platform. To achieve the above-described objective, the method of the present invention may be characterized by comprising: a step in which an administrator terminal transmits preset critical environmental data of a pharmaceutical to a main server; a step in which a transportation means equipped with a transport terminal, a pharmaceutical package, and a package environmental control device is prepared; a step in which the transport terminal transmits real-time environmental data of the pharmaceutical package to the main server; a step in which a weather information terminal transmits, to the main server, real-time meteorological data and meteorological data corresponding to a period after a lapse of a first time interval; a step in which the main server generates predicted environmental data of the pharmaceutical package corresponding to the period after the lapse of the first time interval using a first artificial intelligence module; a step in which the main server generates control setting values of the package environmental control device corresponding to the period after the lapse of the first time interval using a second artificial intelligence module; a step in which the main server transmits the control setting valu
Resumen de: WO2026088906A1
Problem To make it possible to move on a course via landmarks without performing a troublesome operation. Solution This movement guidance system comprises: a positioning unit that measures the location of a user; a storage unit that stores a plurality of pieces of course information; and a control unit that extracts at least one piece of the course information from the plurality of pieces of course information on the basis of the location information about the user, and causes a display unit to display the course information as an option that can be selected by the user. Route information in the course information passes through at least one landmark, and the control unit causes an output unit to output movement guidance information by using at least one among audio or video on the basis of the location information and the route information in the course information selected by the user.
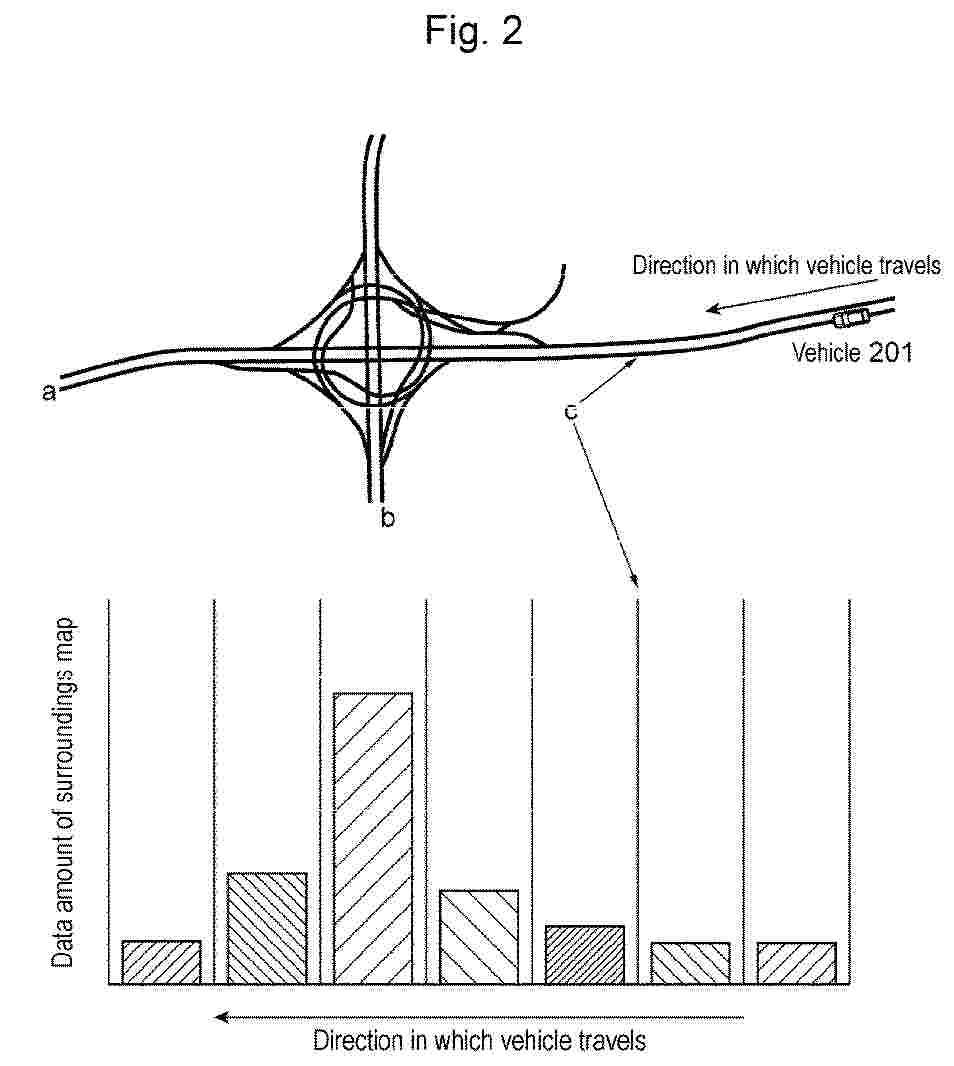
Resumen de: EP4734091A1
Provided is a map distribution device that can prevent delay or omission of distribution of surroundings map information in distribution of map information on the surroundings of a host vehicle to an autonomous driving control device. The map providing device measures a map data amount of map information based on a planned traveling route in advance while the vehicle travels in a section where a load is low, and when finding a section where delay or omission of distribution of map data could occur, starts distribution of the map data to the autonomous driving control device at timing earlier than usual timing, according to the map data amount. When a load factor offers an extra margin, a map data amount or the like in a case where the vehicle departs from the planned traveling route at a branch point is measured as well.
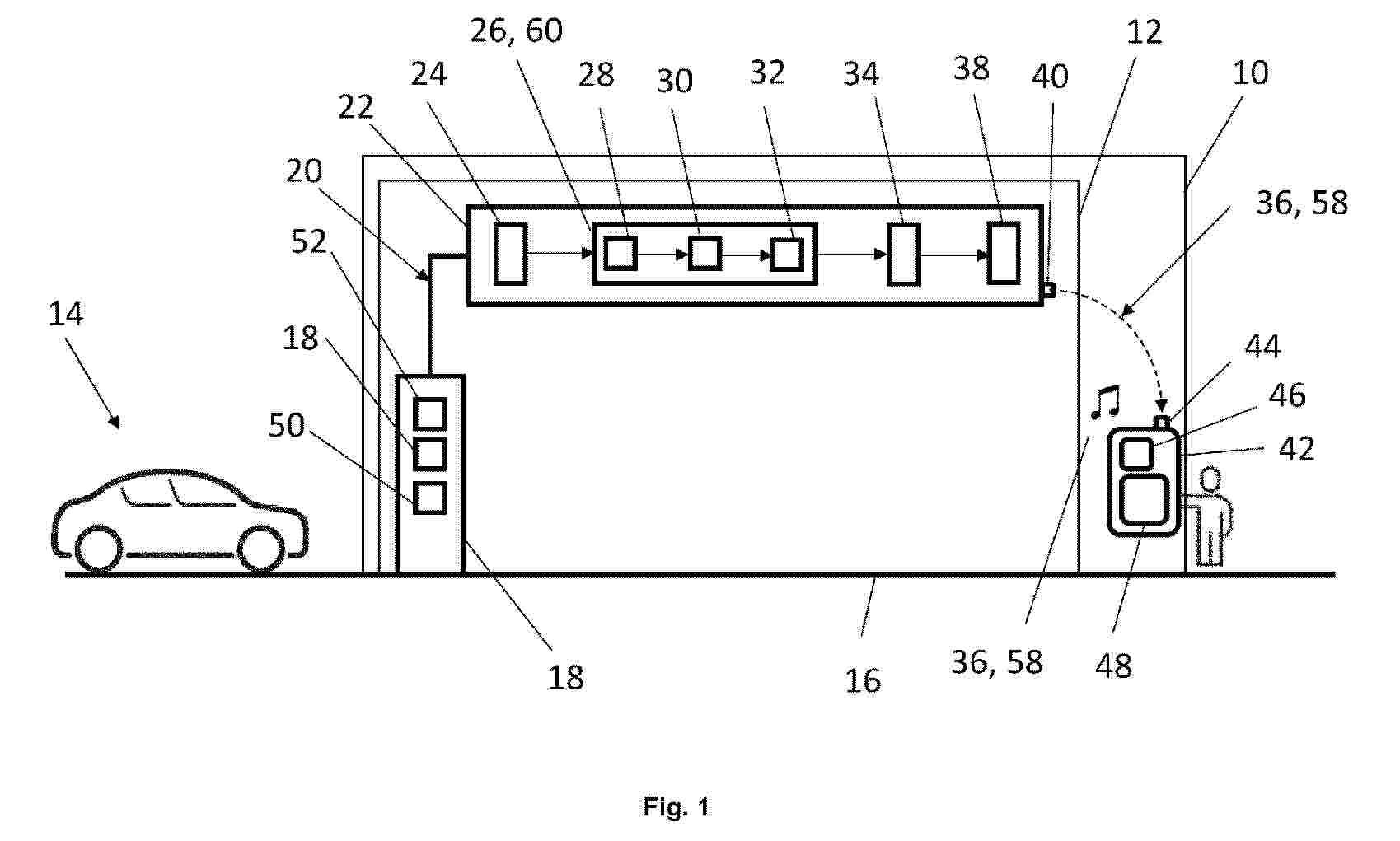
Resumen de: WO2024261152A1
The invention relates to a traffic monitoring system (10) for monitoring a traffic scene, comprising a traffic monitoring facility (12) for recording at least one road user (14) on a roadway (16), said traffic monitoring facility (12) having a detection unit (18) and a monitoring unit (22), wherein the monitoring unit (22) has at least one processing unit (24), a classification unit (26), a comparison unit (34), and an analysis unit (38); and at least one mobile output device (42), said traffic monitoring facility (12) and the at least one mobile output device (42) being connected together so as to transmit data in order to receive the comparison data set (36) of the analysis unit (38) by means of a receiver (44) of the mobile output device (42). The mobile output device (42) has a speaker (46) for phonetically outputting (180) the comparison data set (36), and the traffic monitoring system (10) is designed to carry out according to the invention.
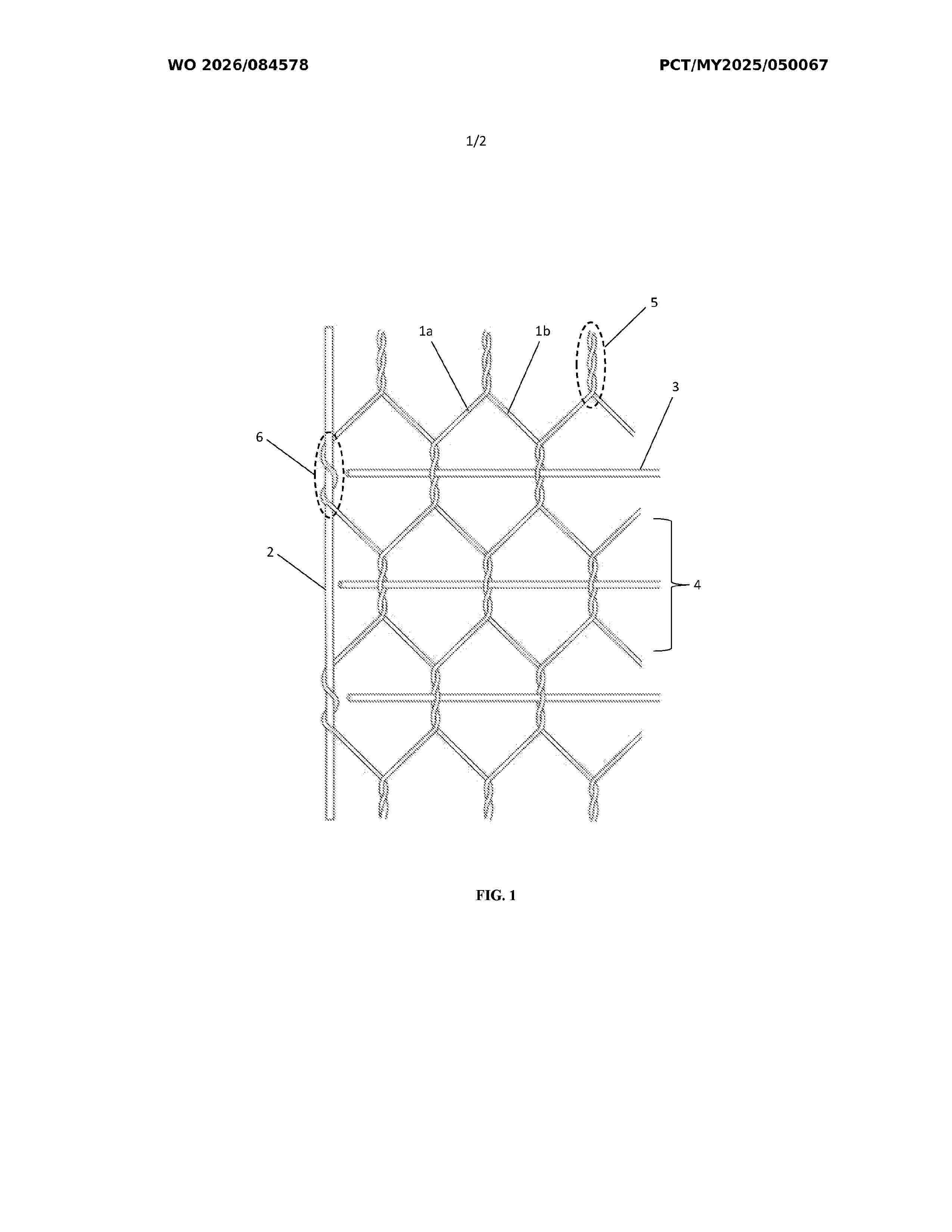
Resumen de: WO2026084578A1
The present invention discloses a reinforced wire netting comprising a plurality of metal wires (1a, 1b) including a first metal wire (1a) and a second metal wire (1b), each being arranged in a side-by-side relationship to one another to form a plurality of polygonal meshes (4), in which the metal wires (1a, 1b) are intertwined to form a plurality of spiral twisted structures; at least one longitudinal wire (2) intertwined with the first metal wire (1a) at opposing ends of the reinforced metal wire netting; and a plurality of reinforcement wires (3) being transversely inserted through a space within the spiral twisted structure, in which the reinforcement wires (3) are arranged in a position that is perpendicular relative to the metal wires (1a, 1b) and the longitudinal wires (2); wherein the reinforcement wires (3) are equidistantly spaced from one another at a distance of less than one polygonal mesh (4) apart, with each reinforcement wire (3) having a diameter greater than the longitudinal wire (2) and the metal wires (1a, 1b).
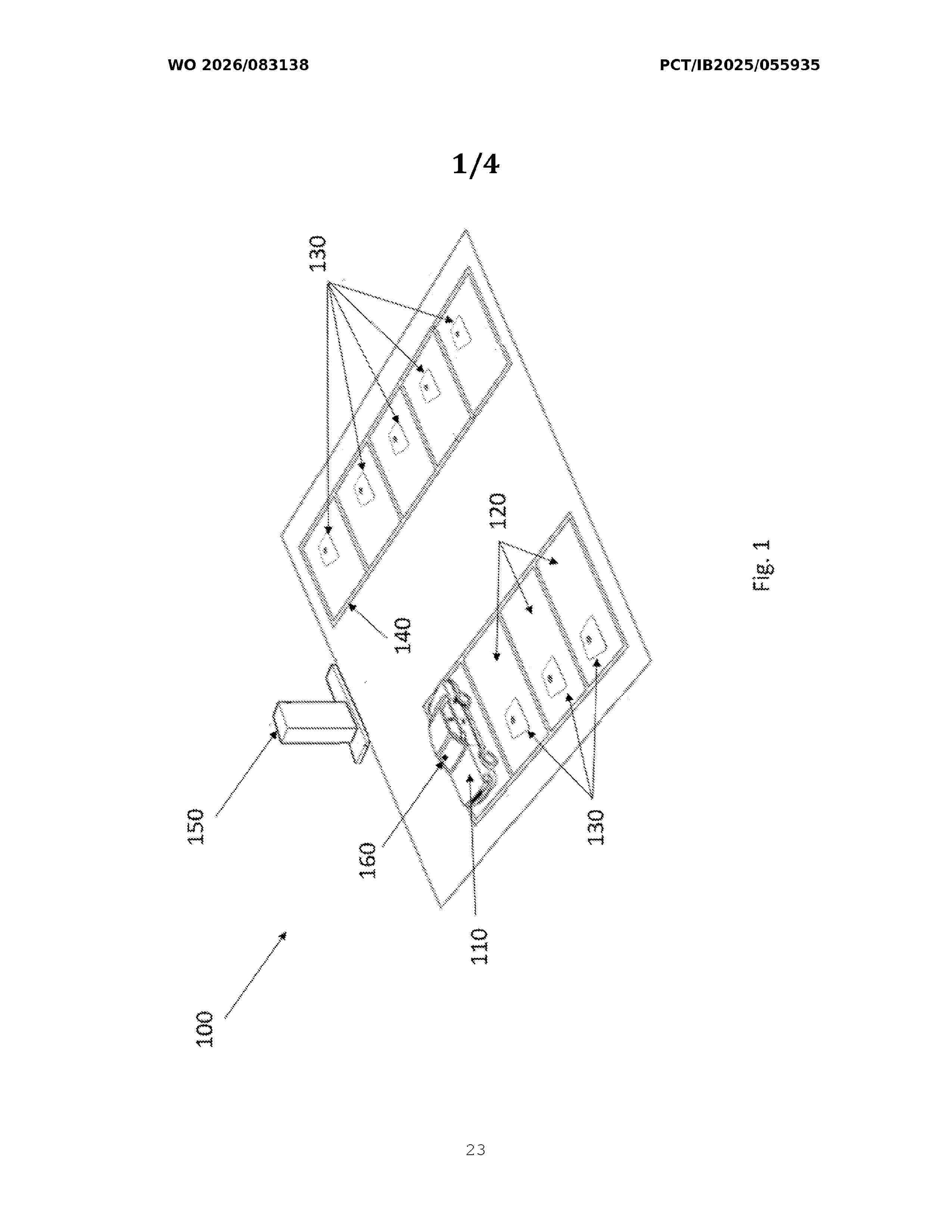
Resumen de: WO2026083138A1
Described herein is a monitoring system (100) for detecting motor vehicles in a plurality of parking bays, said system comprising at least one inductive type sensor device (130) comprising an electronic circuit suitable for detecting an inductance value associated with the presence or absence of a motor vehicle (110) in a parking bay (120) of said plurality of parking bays, said sensor device (130) being coupled to a paving of said parking bay (120); a gateway (150) suitable for managing an occupation state of said plurality of parking bays and an operating state of said at least one sensor device (130), and for storing them into a database, said gateway (150) being connected to said at least one sensor device (130) via a first data exchange network; wherein said at least one sensor device (130) is configured for: - transmitting a first status message representative of said state of occupation, comprising at least one binary piece of information representative of said presence or absence of said motor vehicle (110) in said parking bay (120); - transmitting to said gateway (150), at predetermined time intervals, a second status message representative of said operating state of said at least one sensor device (130); - receiving a configuration message from said gateway (150), and transmitting a confirmation message in reply to said configuration message, said configuration message comprising at least one operating parameter for said at least one sensor device (130); and wherein
Resumen de: EP4730297A1
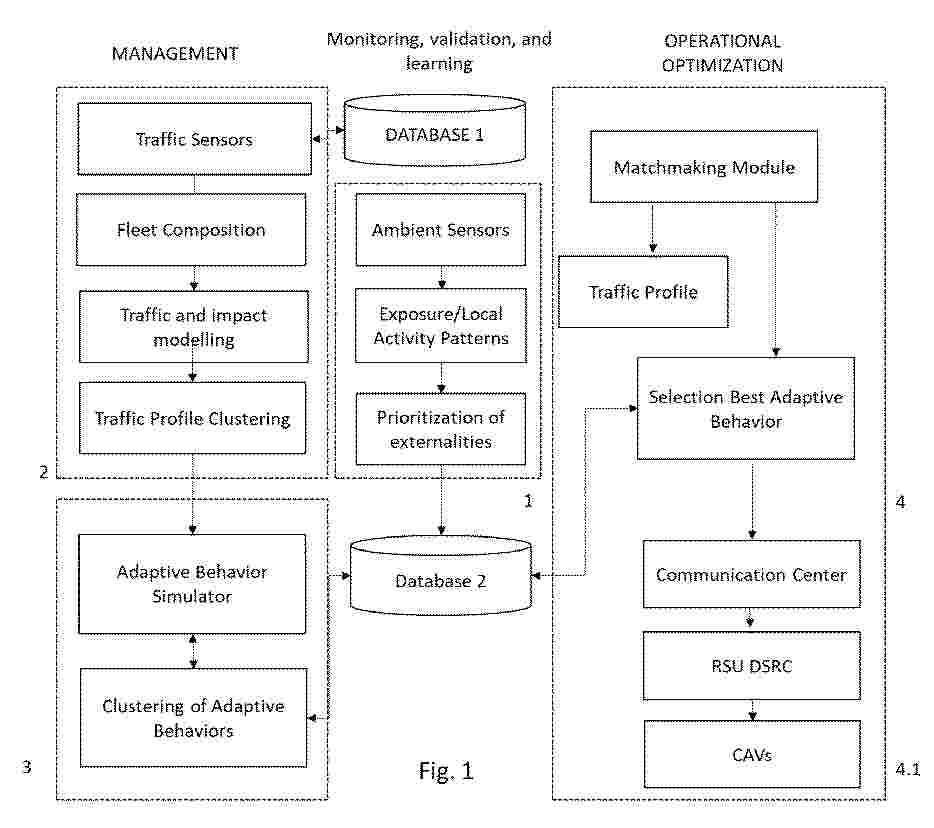
A computer-implemented method is disclosed comprising data collection steps, by means of environmental sensors (20) and traffic sensors (21) relating to a traffic segment (10), to identify vulnerabilities and negative externalities by first training a model for applying adaptive behaviors. The method includes sending recommendations to connected automated vehicles (CAVs) (60) circulating in an area (11) upstream of the segment (10), with the adaptive behaviors that minimize negative externalities, e.g., pollution or noise for pedestrians (80) or critical buildings (A), considering the non-autonomous conventional vehicles (CVs) (70) present on the road. The previously trained model continues to be trained during the application of the invention on a segment (10). The system that implements the method comprises computational modules for control and evaluation (30) and decision, selection and transmission (40), which through transmission units (50) launch recommendations to the CAVs (60) with adaptive behaviors.
Nº publicación: EP4729694A1 22/04/2026
Solicitante:
LINETECH GMBH & CO KG [DE]
Resumen de: EP4729694A1
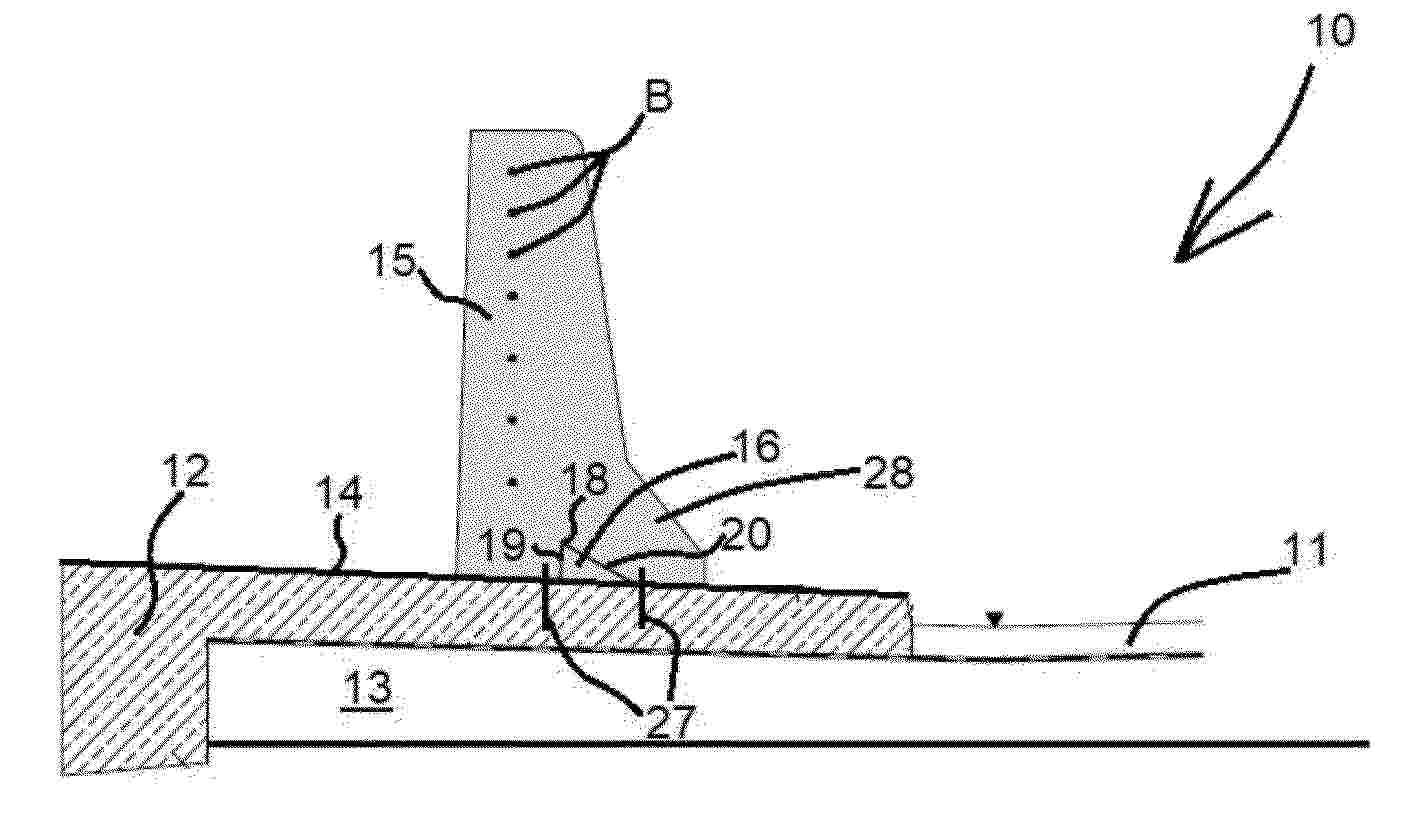
0001 Die Erfindung hat ein Ingenieurbauwerk für Verkehrsanlagen, insbesondere Brückenbauwerk (10), mit einer Oberseite (14) und einer auf der Oberseite im Wesentlichen parallel zu einem Verkehrsweg (11) verlaufend angeordneten Betonschutzwand (15), die in Ortbetonbauweise auf der Oberseite (14) errichtet ist, sowie ein Verfahren zum Herstellen einer Schutzeinrichtung in Form einer Betonschutzwand (15) auf einem eine Oberseite (14) aufweisenden Ingenieurbauwerk, insbesondere einem Brückenbauwerk (10) zum Gegenstand. Um zuverlässig zu gewährleisten, dass die auf dem Bauwerk errichtete Ortbetonwand ihre Position zuverlässig auf der Oberseite (14) beibehält, schlägt die Erfindung mindestens ein an der Oberseite (14) des Bauwerks (10) aufragend angeordnetes, fest mit dem Bauwerk (10) verbundenes Verankerungselement (16) vor, das von der Betonschutzwand (15) mit deren auf der Oberseite (14) aufstehenden Sockelteil (28) form-, stoff- und/oder kraftschlüssig umschlossen wird.
 BOPI
BOPI
 Sede Electrónica
Sede Electrónica